A balancing robot, made without the use of Arduino, other ready-made modules, as well as ready-made libraries and programs to them. ...all soft and hardware is handmade))..
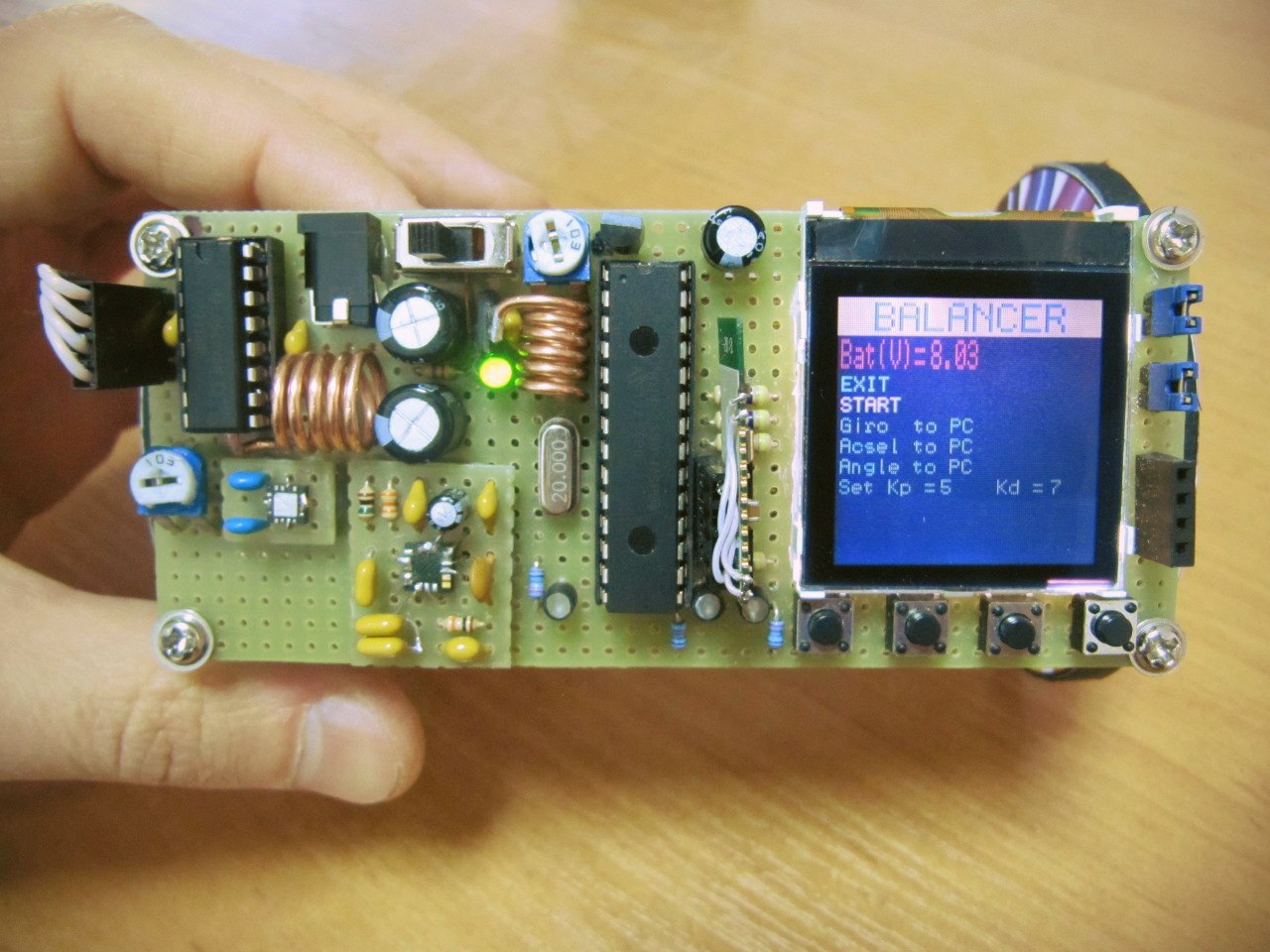
The robot generates telemetry(sensor readings, the total deflection angle) to your PC via BlueTooth.....
....is configured robot from a computer (set of calibration coefficients)
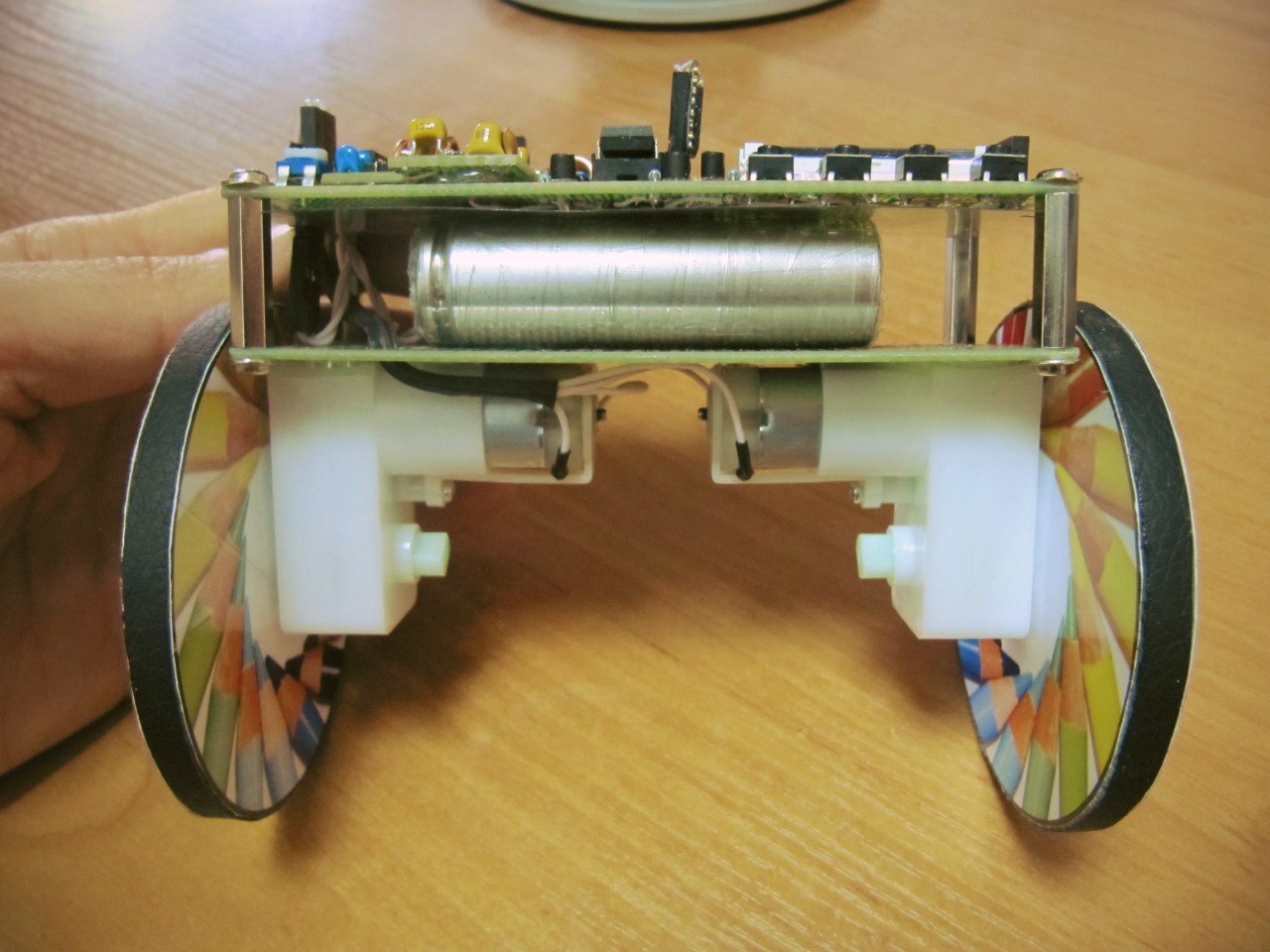
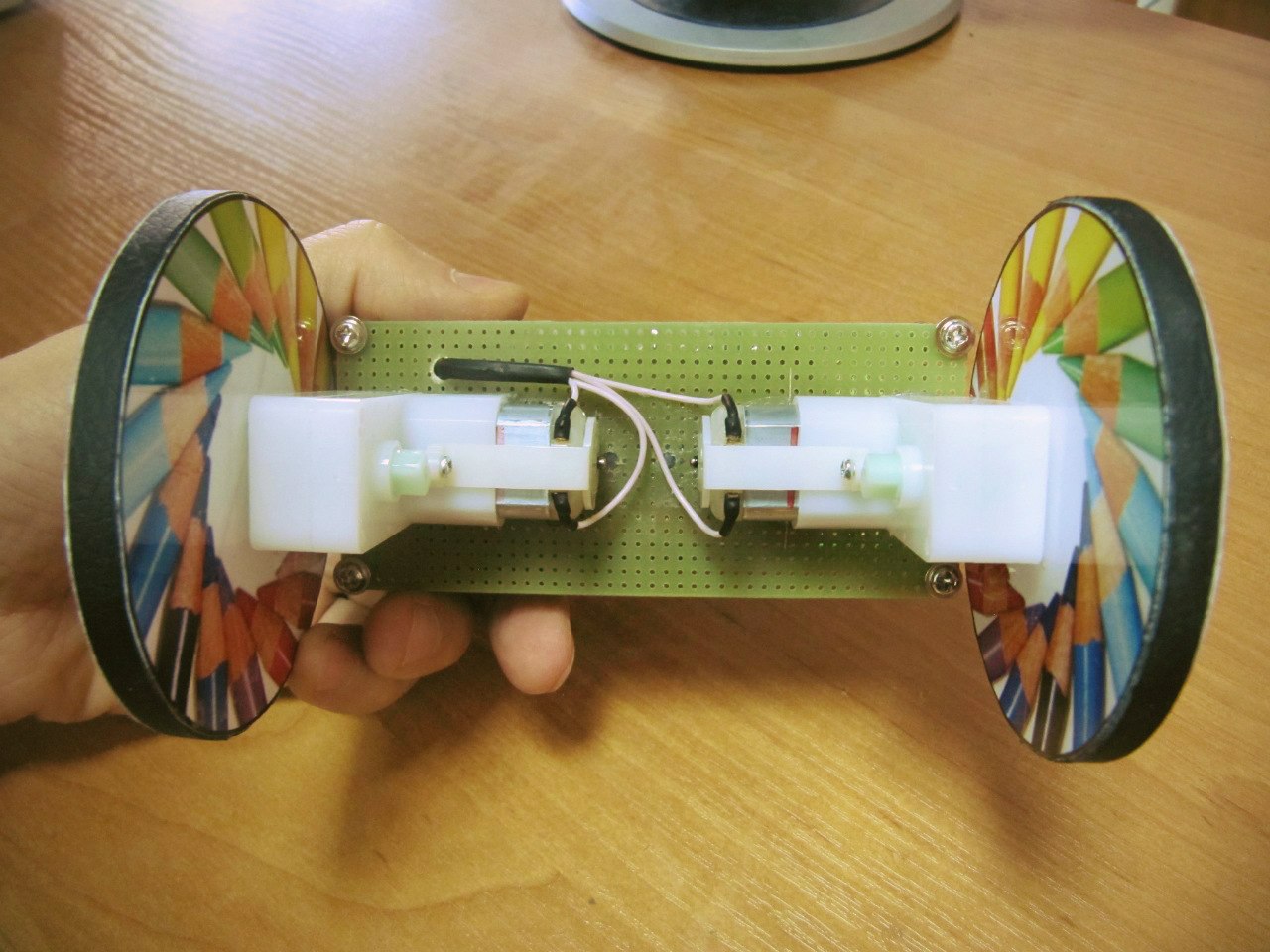
The robot used: 1. Microcontroller PIC 18F2550 2. Gyro LPR530AL (used 1 vector) 3. The accelerometer ADXL335 (used 1 vector) 4. LCD from an old nokia 7210 5. The BATT from the laptop 6. Wheels made from a folded stack of CD (8cm)... 7. Two motors, with gear ratio 1:120, (as it turned out, too large, preferably less!)..
Are you interested in hardware or software? The hardware is very simple, the motor control carries out the PIC microcontroller through the driver L293 motor. Information about the position of the robot is read from the two sensors and fed to the analog ports of the microcontroller. The angle is calculated using a complementary filter. Additionally displaying information on the monitor. The robot is controlled using the 4 buttons, but also via BlueThooth. If you are interested in an electrical circuit, then I can later draw.
I am very much intrested. The reason I am intrested in this is because I am trying to build a spy robot and I am considering all designs. I want the robot to do the following.
The PC displays the data from the gyroscope, the accelerometer and the calculated angle, and setting the coefficients Kp and Kd PID, as well as planned motion control of the robot via BlueTooth.
You should know I am trying to build a spy robot or at least I am thinking about it. You should know when I ment if you could post your designs I ment everything incuding electricals, software, mechanical, and everything else. Is that simple enough.
Wait so you are saying that you will help me. Just to let you know I am not even sure what robot I am going to build. So there is not much you can do now.
in the process of construction of the robot was that heated driver L293 motor and regulator 3.3 V (in the case of SMD, but soldered vertically), had to solve the problem on the go…because I had a free place on the Board, I made from copper wire two radiators, one soldered to the stabilizer, and the second was placed under the driver motors on the thermal paste…problem solved)))
I will let you know when I need help beginning my robot?
You should know right now I have my hands tied. I have many diy projects I have been working on and I will let you know when I am in a need to build a robot. But right now I am trying to build many things so wish me good luck.
better not to use the plastic gear and metallic, and with a lower gear ratio (approximately 1:50), then there will be less backlash wheels and more stable robot…but I realized when it was too late to change anything))