Robo-Art: Balancing Robot (without Arduino)
A balancing robot, made without the use of Arduino, other ready-made modules, as well as ready-made libraries and programs to them.
...all soft and hardware is handmade))..
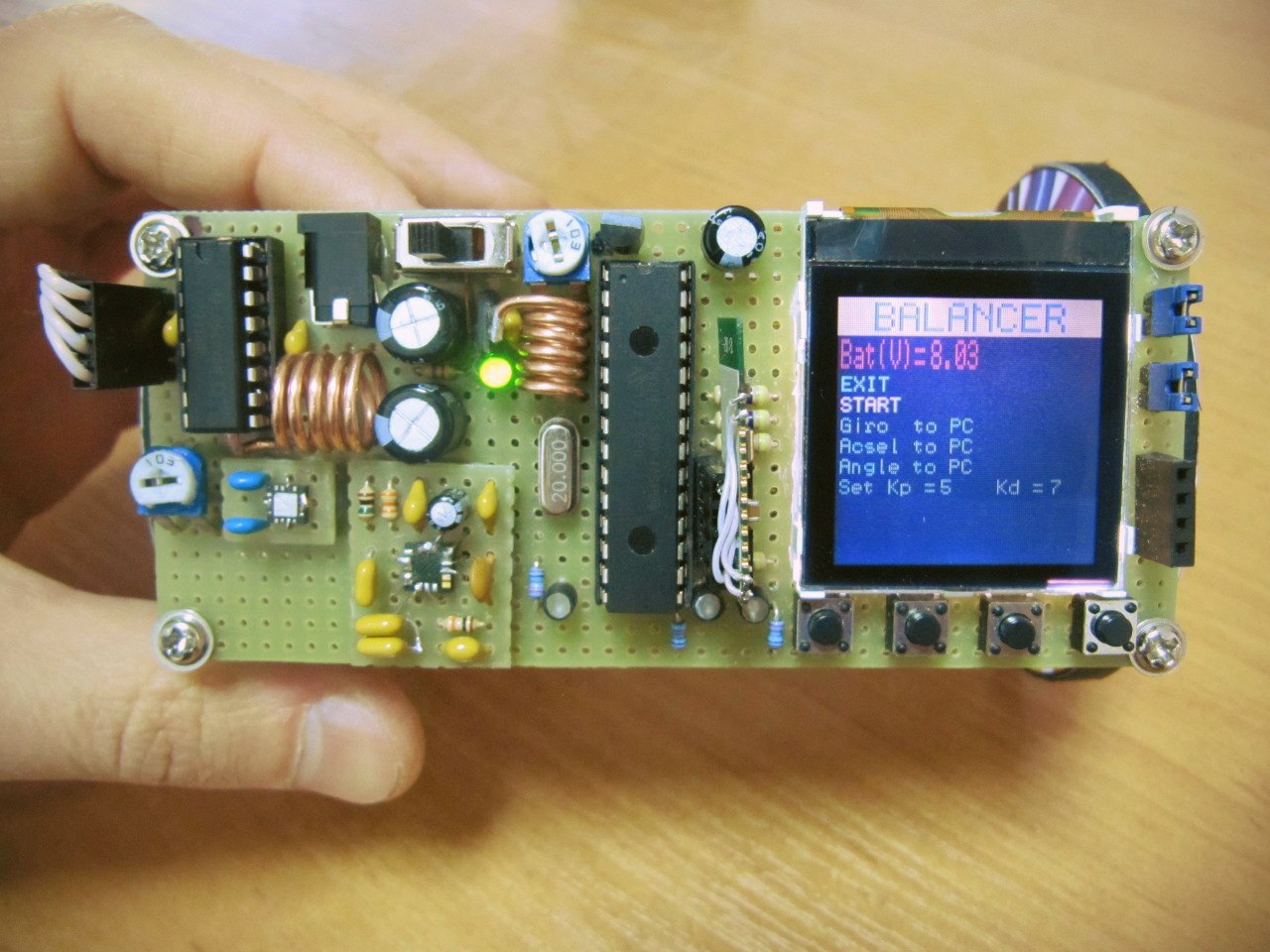
The robot generates telemetry(sensor readings, the total deflection angle) to your PC via BlueTooth.....
....is configured robot from a computer (set of calibration coefficients)
The robot used:
1. Microcontroller PIC 18F2550
2. Gyro LPR530AL (used 1 vector)
3. The accelerometer ADXL335 (used 1 vector)
4. LCD from an old nokia 7210
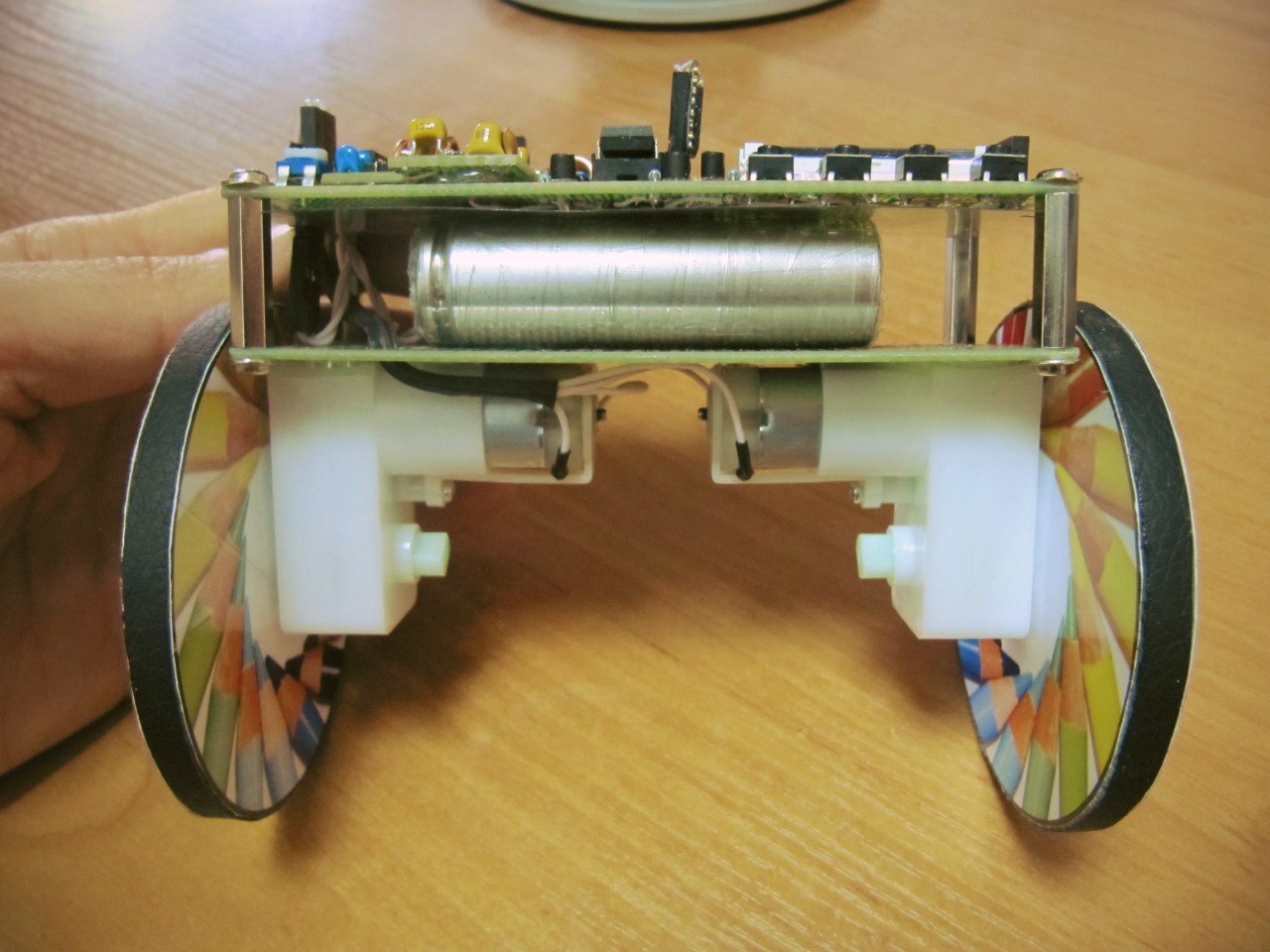
5. The BATT from the laptop
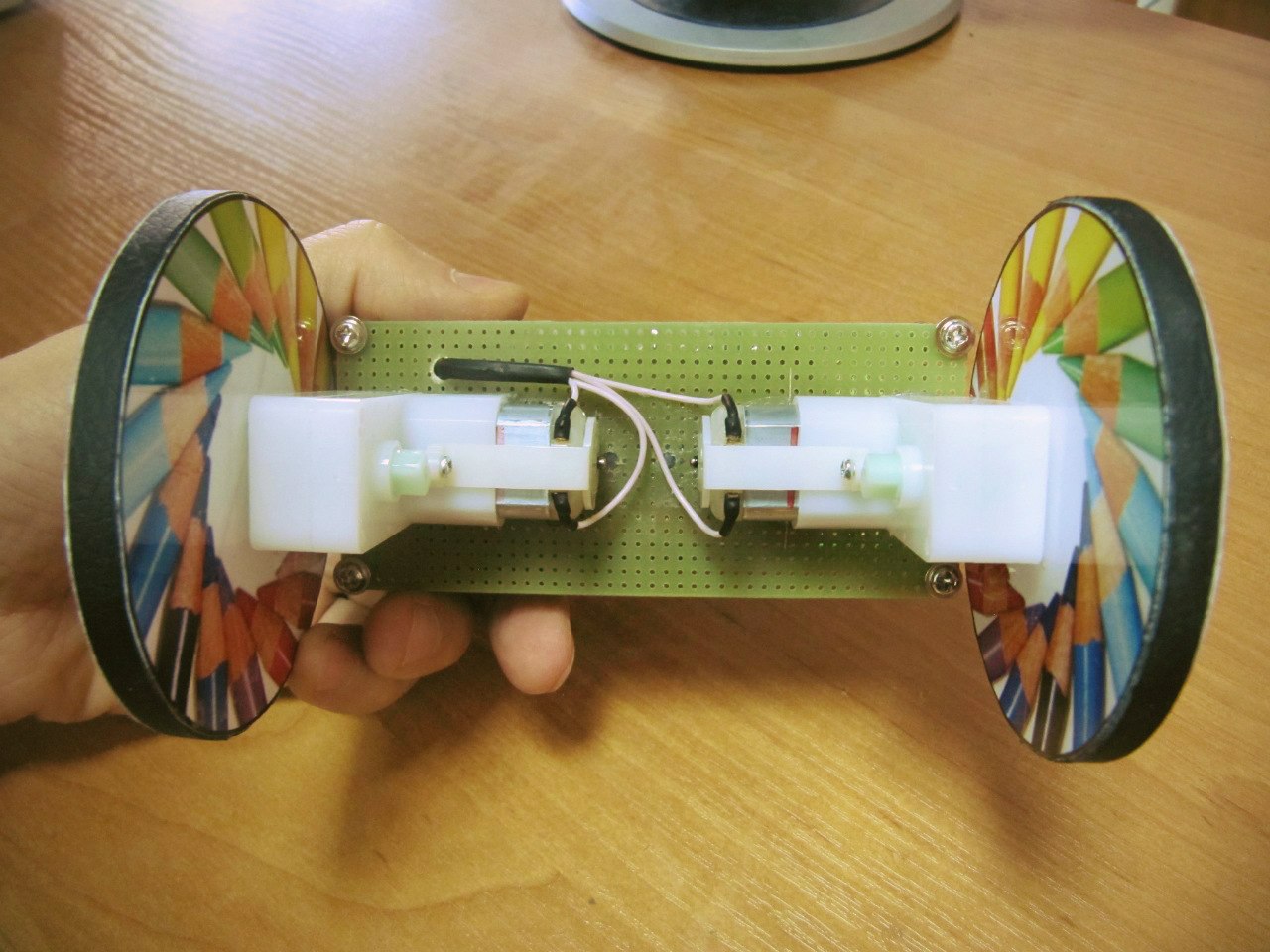
6. Wheels made from a folded stack of CD (8cm)...
7. Two motors, with gear ratio 1:120, (as it turned out, too large, preferably less!)..