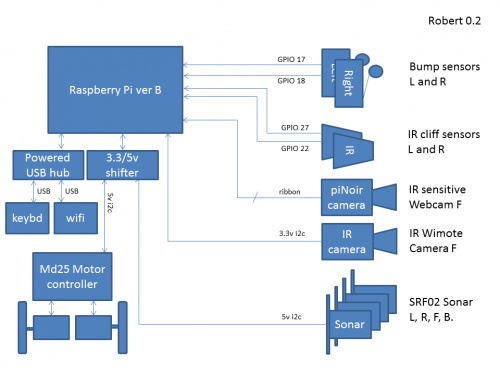
Hardware all works, so now concentrating on software stack. First project on LMR.
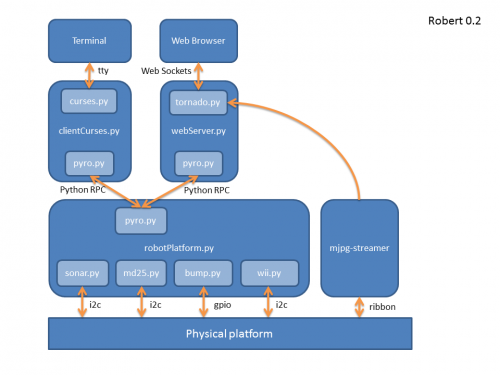
Software written in python, using pyro RPC to comumicate between components. Two Components currently : a curses-based client for console control and a web-server. Javascript and webSockets provide a real-time, updating web-page for remote control.
Yes - how is the performance of python RPC? Just installed pyro with pip. Any tips or tutorials with first steps for pyro? What program do you use for your nice mockup-diagrams? Great bot!
It’s about 25cm cubed, mostly set by the length of the two motors+wheels.
No real mission, other than to keep me amused! I’m mostly interested in autonomous action - I want it wondering around the house; mapping; returning to it’s nest for recharging - stuff like that. Long way off just yet…
I am just making my first steps with pyro. The fortune-cookie example explains it very good. It seems to be an ideal solution for the highlevel protocol. Especially the multithreading and automatic rebinding methods are cool - and this thingy is fast. Thanks for the tip!