

I think you should use this section: https://community.robotshop.com/robots
1 Like
No problem, this is pretty interesting.
A robot doesn’t always have to move to be a robot.
2 Likes
It is possible I have to reset the firmware through Arduino first.
It’s something I didn’t consider as a part of the hardware section. However, I would appreciate any suggestion by readers. It’s been rough rereading everything…
1 Like

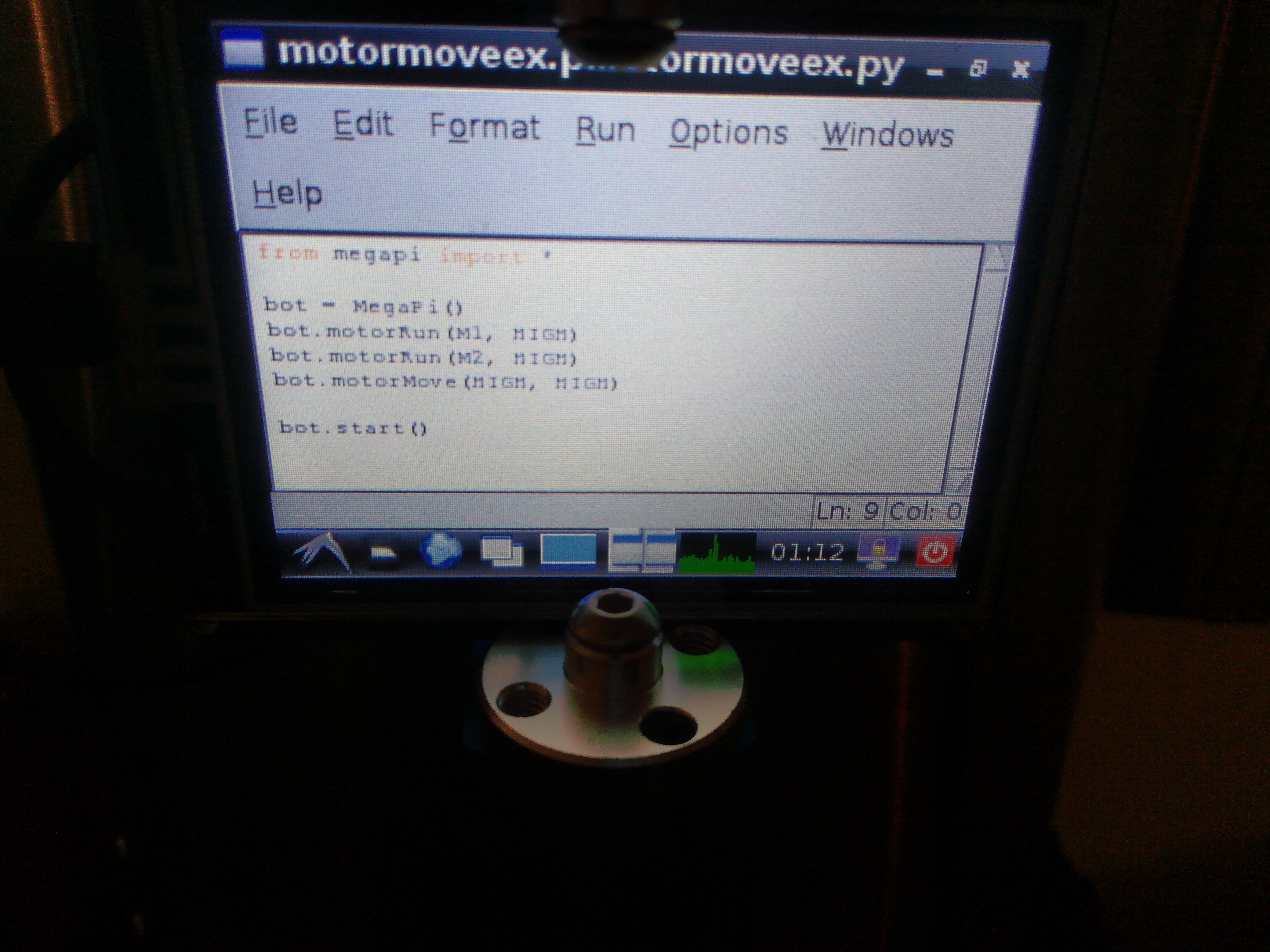
Upload final on Window’s IDE.
1 Like




(I want to apologize for seeming so irritated last year. This is a big deal to me.)
I hope everyone is still watching my topic.
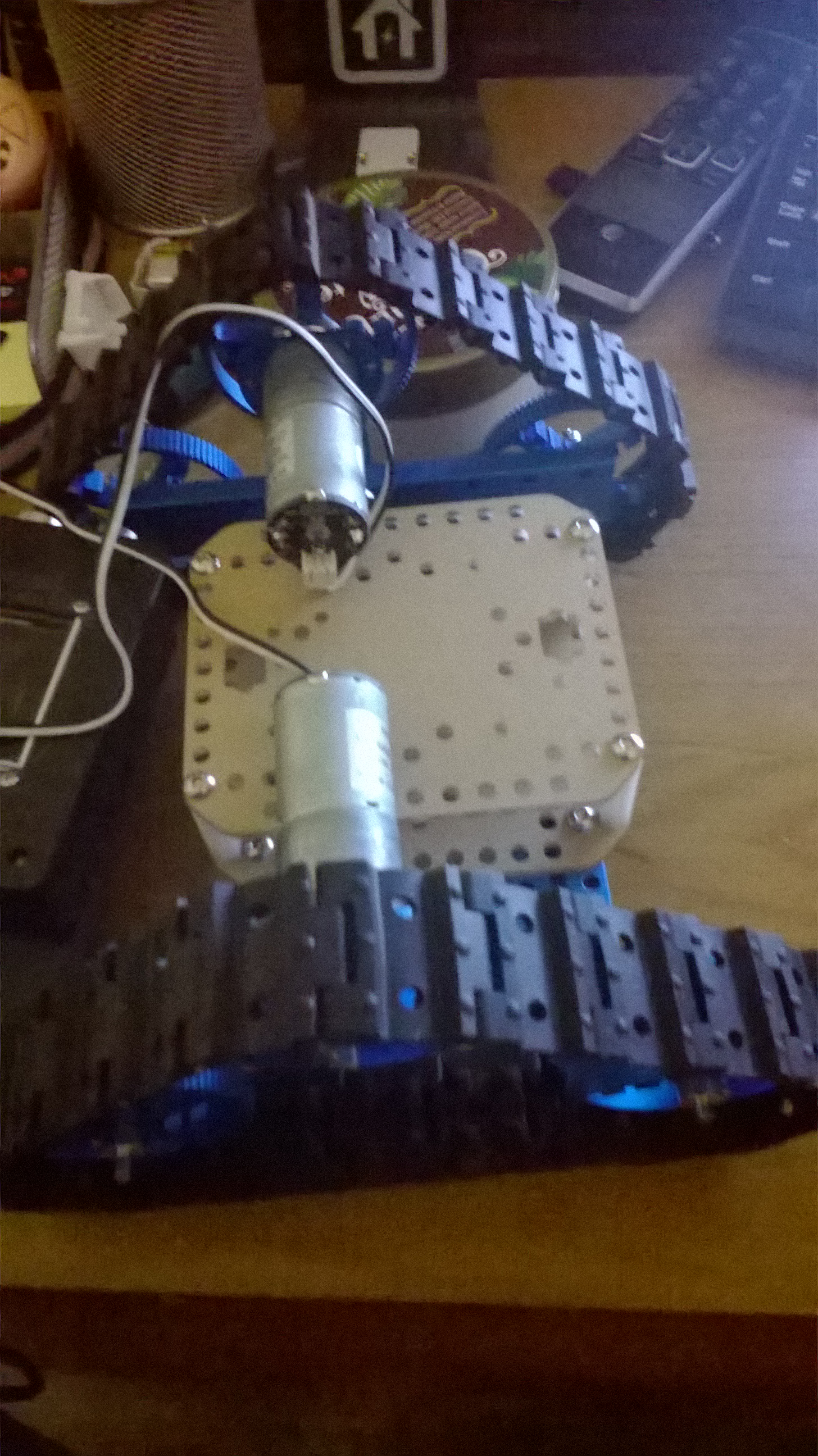
I’ve been working on Gizmo my Tracbot. I will be making lots of updates tomorrow.
I found the solution to the issues I was having. Since last year, I have also decided not to use a screen.
The reason I am making this change is because of the head. I thought about how the finished model will look.
(See here)
The head is the real bot in all of this. What the head -python will do is import the files that run the treads and arms. It will simultaneously upload and run them all at once. There is no reason to add extra parts to >Legs.
If you think about it, I have so many options up top. I can customize Gizmo with whatever I prefer. I shouldn’t spend any extra time on specific parts. I’d like to maybe make something in the future with the USB screen, but not for Gizmo.
For now, my update will be on taking pictures/video of Gizmo running and the python I fixed.
For financial reasons atm, the project is mostly suspended. I will be testing head options and the Pi. I will also be looking for the right arms. I will use grippers.
I am currently working on some sensor projects. I just wanted to leave an update so everyone knows I haven’t abandoned probably one of the best robots of the last decade.
I remember a few requests from moderators the last time I worked on this. Please let me know if there is anything you would like to see from this project.
1 Like
Hey!!
If you have about $500 that’s about 4/5. The kits I bought were less than $100. There’s no reason for a screen. I’ll be moving the HDMI side to the rear. Part 2 costed much less than $200.
The head needs at least two motors installed with wheels. I’ll be mounting a computer and camera up there. The grippers might cost $100. Make yourself a list and diagram like mine and I’ll work with you on it. Let me know 
1 Like

1 Like
An excerpt from a video about the shelf.
I wanted to share this video for ideas.
Let me know what you think about the video and ideas about my project.
1 Like
I have been looking at ways to reduce power, programming issues, design, ect.
My original intent was to use two pis. However, in order to smooth out programming issues in this project, I will be removing the second and moving the pi2 to head.
Since only one motor is absolutely required to move the head as intended, I am liberally redesigning one motor mechanic for convenience. I’m looking for arm “ideas”. I figure everything has been re-improvised thus far.
Should I go with makeblock grippers? Are they even strong enough to support most of the body? I’ll be looking these up anyway.
I found this helpful reference for some of my recent thoughts on all these issues.
The makeblock gripper test… which proves as a budget friendly option.
My other option is
It looks like there are too many servos in this one.
Only kind of related - but this is what I think when people on robotshop community tell you that movie robots don’t exist.
I just looked into the arm thing again.
After checking availability for the gripper, I will have to wait a month. I’ll have one last arm update in the summer. I’ll update everyone on the head periodically.
Until that
1 Like
 !
!
Robot weight test
The head after installation.

1 Like
1 Like
1 Like
I’m too lazy to make a formal post.
Found this Alexa Robotbear …which is a robot, and essentially like mine so…maybe someone will do a blog/news post on it.
1 Like



Just a fun example.
This

is what I’m working with until I can afford the parts to remake the arms as they should be.
The servo motor will be installed on the side. The “elbow” will be two gear shafts connected by a lever plate. The joint will have a spring that allows the “tricep” to move upwards and straighten out the forearm.
- I will be currently testing the makerblock plates as an alternative, but I am very low on parts at this time.