yeah, that last one was interesting, not sure how he was doing that with 1 sensor unless it was using a reflected light that was between the black and the brown…
That certianly cuts down on the number of sensors…I wonder how it would work with the maze type line setups though.
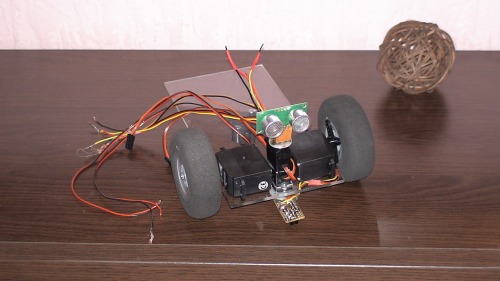
actually i think you could actually i think you could do a maze. You need to to sweep a bit for staying on the line and sweep the sensor alot for finding the turns. You could but it may not be easy.