



Rally-LMR 2010
Hallo Guys!!!
Because my Remot Control of "Fishing robo(A)t" is broken, have I a little time for next robots.
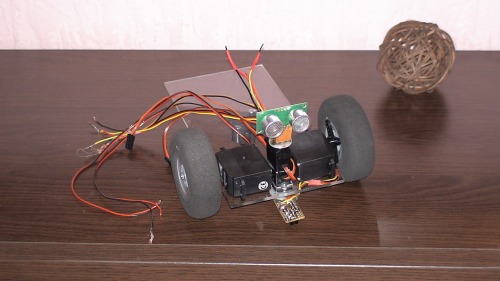
I wanted always to build a Line Follower robot. This is very easy robot. He has two CMY70 sensors, but he can drive with only one sensor.
Here you can see one CMY70

and here second.
I built also one SRF05 Ultrasonic.
More photos of the building can you see in a first film.
Line follower
- Actuators / output devices: Two servos modiefied for continuos rotation
- CPU: Picaxe 28x1
- Power source: 6V
- Programming language: Basic
- Sensors / input devices: One / two CNY 70