Next step:
I plug in the Serial port -> USB cable into the Botboard.
I then apply power to the entire robot, the 6V to the servos and the 9V to the logic.
what happens is:
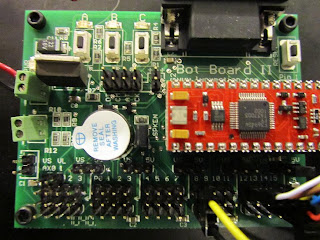
- the green light on the bot board is ON
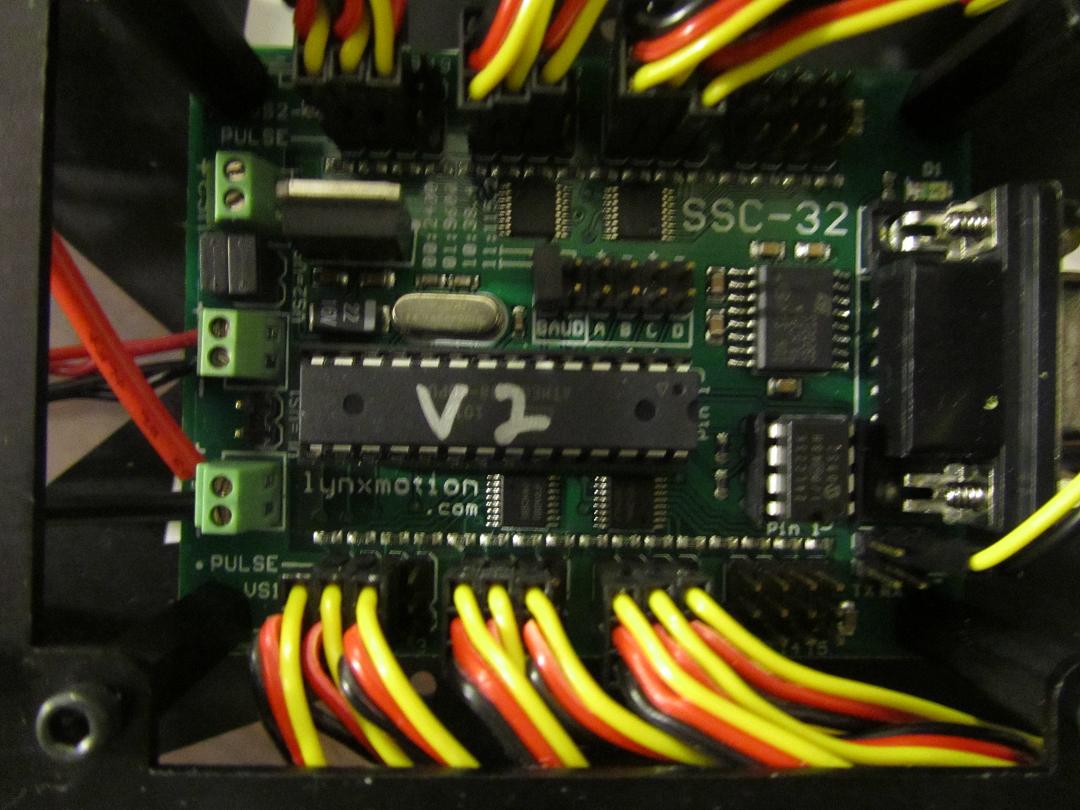
- the green light on the SSC32 is OFF
- the legs snap to the “aligned” position
- the servos hum
The next instruction is to “Program the ATOM”.
I open the zeus.bas program from powerpod in “Basic Micro Studio”, and then click the “Program” button.
The robots legs go down and up, and then beeps
Micro studio says: “Writing” which it does for a while, then “Verifying” for a small bit, then the legs go down and up, and then beep again.
Micro studio then says: “no errors detected, programing…, finished programing.”
The robot now stands in the “aligned” position, green light ON on botboard II, and green light OFF on SSC32.
The next instruction is: “Install the PS2 controller receiver into the PS2 cable on the robot, and apply power.”
I plug the PS2 controller reciever into the PS2 cable, which then flashes a red light and has a constant green light. The instructions then say to apply power, which i find strange - power is already applied to the robot, in order to program the ATOM.
The next thing that is supposed to happen is:
“If all is well, you should hear a few short beeps, the legs should snap to position, and slowly lift the body up. Then the two tripods will lift and lower once.”
Which doesnt happen. This is where I am stuck. I will now turn the robot off, and then on again, and report what happens:
- when turned off, the robots legs go loose.
- when turned on again, the robot stands up to the “aligned” position, but all the lights (on the BB2, SSC32, and PS2 reciever) are the same as they were before.
Unsure of what is wrong, I then put batteries into the PS2 controller. The red light on the PS2 reciever stops flashing (implying that it has now connected with the controller) The green light is still on on the BB2, and still off on the SSC32. I then attempt to press the buttons on the controller, but no response - also the SSC32 light does not turn on at any point during this time. (pressing analog on and off does nothing either)
Now, I am at a loss as to what is going wrong here, so can anyone suggest something I can do to troubleshoot the problem? Or does anyone see why it is not working?