My name is Toshi, and I have begun my journey of creating my very own CH3-R Hexapod. It just arrived in today, and so I am looking at all the parts, and the online guides, and basically having a great time unpacking and thinking about how I am going to go about putting this together. Im going to start this topic in order to ask questions of the community, and also to document my progress. I also have a blog which you can click here.
My initial work space looks like this, a lil cluttered I know, but I just unpacked the boxes
Anyway, to my initial question, the assembly guide im reading (im starting with the legs, unless anyone thinks theres an easier start point) says that I need 6 right legs, except for:
“Important! If you are building legs for the EH3-R using the Bot Board / Basic Atom 28, and SSC-32, then you need to build three right legs and three left legs. This is also true if you are building for a standard insect looking hexapod such as the EH3. However, if you are building for the EH3-R using the ServoPod then you need to make 6 right legs.”
However, I am building for the CH3-R, therefore I ignore the right and left leg advice, am I correct in thinking this? Dont want to spend hours before realising I did it the wrong way
Ah yes - that would be very helpful to those starting off for the first time. I found that I used the photos to orient myself as to where the brackets fit together, so photos of both sides would be good.
Incidentally, I have finished all 6 legs and the body, I will take a photo tonight
Also, the servocontroller is installed, but it needs to connect to my computer via a serial port, of which I dont have. I will have to pick one up shortly, before I can make any more progress
Ive also shown the addon decks and the current torso (looks a little small, i know, but it still has some more parts coming, and will be at least 2 or 3 times as wide, and maybe 50% taller when it is complete.)
Theres a can of flyspray for reference, if my hand wasnt reference enough!
Hey guys - I have a question regarding an issue I am having.
The robot is, completed, however I am not able to get the PS2 controller to communicate with the robot to get it to move.
Ive had a look through the troubleshooting guide, but cant see my problem or the solution to my problem there.
I will try to describe it, so that you know what im talking about -
The step I am up to in the guide is:
So -
What works is:
When i turn on the Lynxmotion PS2 controller, the red light flashes continously. I have tried changing it to analog mode, vibrate on and off, and none of the buttons make any responses in the robot.
When i turn on the robot with the 6V supply to the servos and the 9V supply to the logic, the Bot Board II beeps once and the green light comes on, continously.
I cant see the SSC-32, but when powered on the legs snap to position and a humming noise comes from the servos (i think its coming from them anyway). [after checking again, no lights are on on the SSC-32]
The PS2 reciever (green light + red light) turns on, the green light stays on continously and the red light flashes. These dont change no matter what i do to the Lynxmotion PS2 controller.
All batteries that I am using are either new, or fully charged.
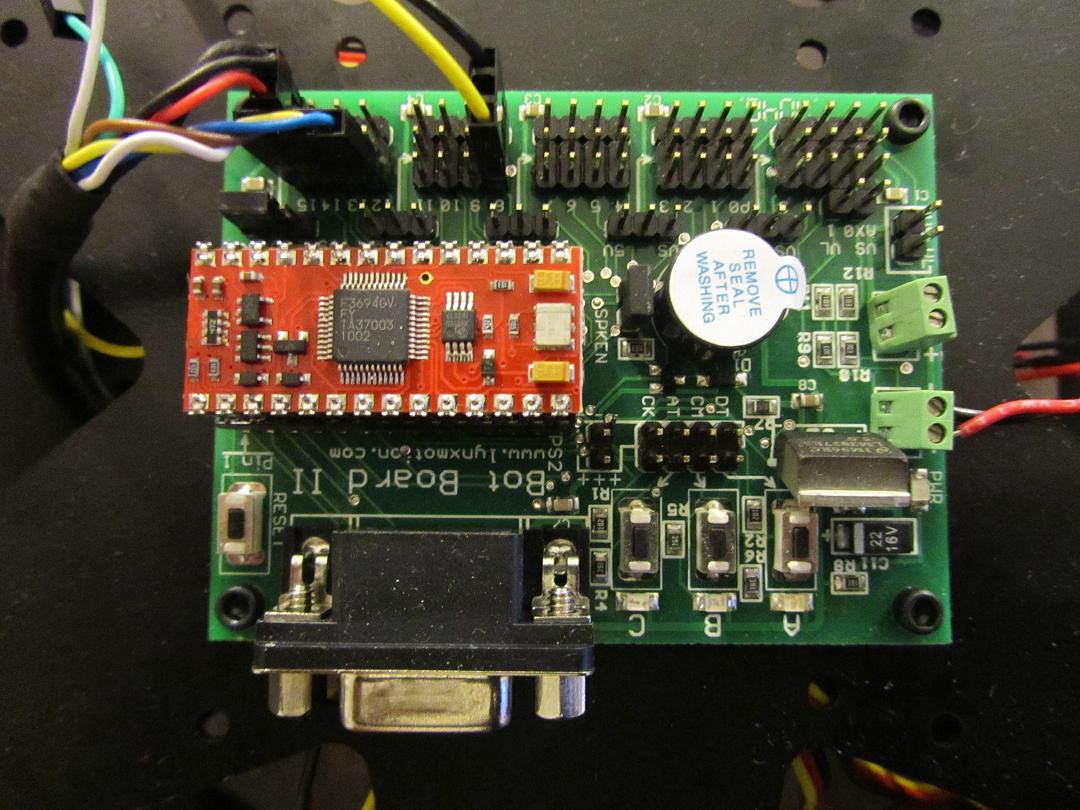
See attached a picture of the Bot Board II, which i believe looks exactly like the schematic: (its a crappy picture, i can take a better one tonight if it will help)
My hunch is that its the communication between the boards. what code have you used?
most user i feel use the bi-direction communication this like. you can check this by looking at your code. it will look something like this:
[code];[SERIAL CONNECTIONS]
SSC_OUT con P11 ;Output pin for (SSC32 RX) on BotBoard (Yellow)
SSC_IN con P10 ;Input pin for (SSC32 TX) on BotBoard (Blue)
SSC_BAUTE con i38400 ;SSC32 Baute rate[/code]
Thanks for the reply Innerbreed, I checked over the code and it does not have that snippet in the code at all.
I got the code using the master.pmp file, through Powerpod. I believe I followed all the instructions, but have i missed something? Since that snippet isnt in my .bas code?
EDIT:
Also, that diagram that you posted, I noticed that the yellow+black cable that i used between BB2 and SSC is different, it appears to be a black yellow and red cable in your diagram, and it is attached to a different point on the BB2.
I have another question - as I am working on multiple parts of this project at a time (when i get stuck somewhere, I move on to the next part for a while) -
I have a Wireless IP camera that I intend on using on the robot, however when i bought it it came with a wall charger - specs are:
OUTPUT: 5V / 1A Max 5W
I went to the local electronics shop and asked for a battery solution for this, in order to run the camera without it being plugged into the wall. They said that a setup of 6 1.2V AA batteries, at 2500MaH (they are rechargeable NiMH) would work.
However, after thinking about it, this means they output 7.2V, instead of 5V. The guys at the store said that it would work fine and run the IP camera as if it was plugged into the wall - but, not being extremely up on my electronics, I would like a second opinion (before I cut off the transformer and plug in those batteries)
Will this set up work fine for my camera? And not destroy it?
The problem seems to be obvious to me. The PS2 is not working… You’re using powerpod code and it does snap the legs into position when powered up. It also lifts and lowers the two tripods and awaits PS2 control prompts. It’s doing everything up to the point where you control it. Try powering everything up and then turn the PS2 off then back on. See if this makes it connect. (the goal is to get the LEDs to stop blinking) If you have an old PS2 game console it can be used to test the controller.
Wait… The blue wire belongs on pin 12. I think you have the cable on backwards.
FYI - The picture above is incorrect. The pin numbers and colors are correct, but the function labels is not. That is it should be:
P12 - DAT - Brown
P13 - CMD - Orange
P14 - ATT - Yellow
P15 - CLK - BLUE.