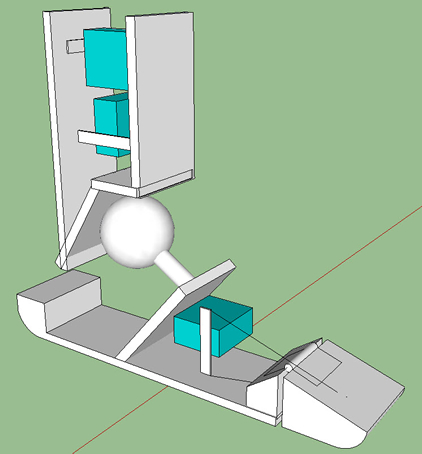
The idea is to use my 'ping pong joint' as the ankle of a foot, and another servo to control the 'toe' joint (for lack of a better term) at the front of the foot. Seems simple enough, but will see how it goes in the real world.
One question might be if you need the toe at all? If the robot is using the toe for walking, then the servo is probably not strong enough to take the weight. Another thing is, -why is the ping pong ball mounted at an angle?
From my research into walking motions of human legs, the front ‘toes’ hinge is a very important part of the walking motion.
The ping pong ball joint is mounted at an angle so that the whole foot can raise up 25 degrees, and drop 35 degrees from the planar - which is needed for a ‘walking’ action.
These are interesting experiments. I’ve notices there’s been more attention paid to human-like mechanical design. Do you intend to take this all the way to a humanoid machine?
Thank you for the feedback. Humanoid is the eventual goal yes, starting from the ground up - literally. This will be the foot and ankle joint of the robot one day. I’m trying to mimike human movements as close as possible.