



Project Foot
This is the second mission into the world of robotics, with Project Foot. This is a continuation of concepts from my first Project Ping Pong (https://www.robotshop.com/letsmakerobots/node/30836).
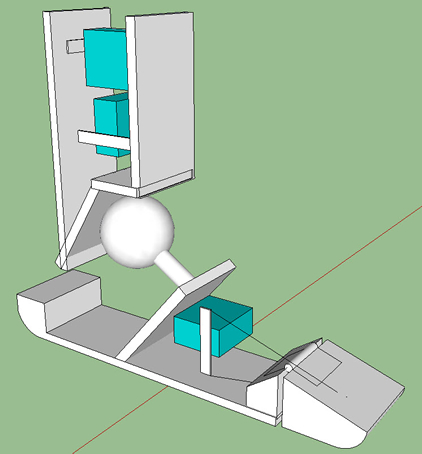
The idea is to use my 'ping pong joint' as the ankle of a foot, and another servo to control the 'toe' joint (for lack of a better term) at the front of the foot. Seems simple enough, but will see how it goes in the real world.
Would love comments if you would take the time.
FR.