Pogo first sprang and sang “To Life” in my home in 2000, from a Rug Warrior Pro robot kit offered by AK Peters, Ltd.His original brain was a 2 MegaHz Motorola 68HC11 with 32K bytes of "non-volitile" RAM.
In 2015, at the age of 15, Pogo underwent a total brain transplant receiving a Raspberry Pi B+, and a year later, underwent a follow-up surgical upgrade to the 1.2 GigaHz, four-core, Raspberry Pi 3 with 1GB of RAM (60-100 times the processing power with 30 thousand times more RAM than the original Rug Warrior Pro 68HC11 brain.)
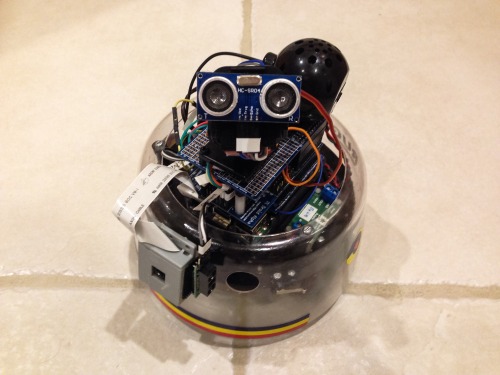
Pogo from the ground up:
RugWarriorPro "Brawns":
Du-Bro 2.5" Dia. captive-air soft rubber tires
Autotrol 6v DC Geared Down Motor
4 C-Cell, and 2 C-Cell, Battery Holders
6" round non-conducting chassis
Delron rolling ball “third wheel”/skid
Full Skirt with six direction bump detection
Added: Pololu 5V Step-Up/Step-Down Voltage Regulator S18V20F5
Six 5000mAh C-Cells
Raspberry Pi 3 - 1.2GHz Four-core Processor w/1GB RAM
Brawns to PiDA Connection Card
Mikronauts Pi Droid Alpha Robotics Digital and Analog Interface
MCP3208 10-bit ADC
MCP23S17 16 channel Digital I/O Expansion (with Interrupt Line tied to RPi GPIO pin 19)
LM293D Dual H-Bridge Motor Driver
Separate Motor Power Path (unregulated 7.2v)
Separate Servo Power Path (4.8v Four cell tap off battery)
SPI interface to RPi
2:1 voltage divider from 7.2v battery to ADC for 2 mv precision
Top Layer Card (Mikronauts PiJumper)
Pololu SP Power Switch
ACS712 Current Sensor
Tilt-Pan Sensor Platform
Twin SG90 Servos
HC-SR04 Ultrasonic Ranging Sensor
Rechargeable, wired, amplified speaker
Sharp GP2Y0A60 Infrared Distance Sensor
10-150cm / 4 inches-5 feet Ranging
Facing 90 deg left for wall following
Non-linear analog voltage output
PiCam
Mounted at top of skirt facing forward
Software:
Hardware Interface Library in Python
Demonstrations and Test Code:
Sphinx Speech Recognition
Festival Text-To-Speech
Class (with test main) for each sensor
Class (with test main) for motors
GoPiGo Python Function API (Partial)
RugWarriorPro Function API (Partial)
Battery_Life Measurement and Estimation
180 degree Ultrasonic Distance Map to console window
2017: After another SD card went to read-only, and finding the built-in WiFi of my Pi3 board had gone flackey, I managed to bring it to life on the latest Raspbian Stretch, somewhat. Here is my Raspberrry Pi3 upgraded Rug Warrior Pro robot running egret.py ("think alot, act a little"):
Looking forward to seeing photos and videos of Pogo. Since there was no primary image, I temporarily added one of the Pi3. Planning to compete in any competitions?
I wasn’t able to figure out the process well - I tried adding a photo and marking the one you added for delete, but it doesn’t seem to work.
No competitions planned…I just want to get finished with driver level and start working with the PiCam.
I need to learn OpenCV and create a set of camera based “sensors” or “image analyzers”, like:
left and right half of image - light intensity sensor (can output direct to motors for Braitenburg Vehicle Behavior)
r,theta,phi to shape-with-size area of maximum intensity
recognize a Window to the outside (during the day) - returning angle to center, window aspect ratio, and size estimate
recognize a Television screen (16:9 aspect with varying average intensity, surrounded by band with relatively constant average intensity
Returns r,theta,phi to QR Code, AR code in image with code “identifier” - put one on base board of every room
Room recognizer - window match, door size match, 180 degree color sequence match, ??
Human presence recognizer, r,theta,phi to human
Human Identity “Verification” - not just human but what known human
Eventually, (10 years from now - I’m retiring in December), the bot should spend its “just got off charger” time cataloging unknown objects in its environment, and later when it sees I am eating or just sitting down at my desk, should ask if I have time to teach it some object names and attributes.
I really want to figure out how to get out of hearing “I die in 1 hour, recharge me please”, having to plug it in, come back four hours later, and press the on button to start another 6-12 hours of “life”. I think the robot community needs to get together and figure this out - standardize the dock, and contacts, charging circuitry, etc. It is a really hard problem that prevents robots from becoming independent.
I wasn’t able to figure out the process well - I tried adding a photo and marking the one you added for delete, but it doesn’t seem to work.
No competitions planned…I just want to get finished with driver level and start working with the PiCam.
I need to learn OpenCV and create a set of camera based “sensors” or “image analyzers”, like:
left and right half of image - light intensity sensor (can output direct to motors for Braitenburg Vehicle Behavior)
r,theta,phi to shape-with-size area of maximum intensity
recognize a Window to the outside (during the day) - returning angle to center, window aspect ratio, and size estimate
recognize a Television screen (16:9 aspect with varying average intensity, surrounded by band with relatively constant average intensity
Returns r,theta,phi to QR Code, AR code in image with code “identifier” - put one on base board of every room
Room recognizer - window match, door size match, 180 degree color sequence match, ??
Human presence recognizer, r,theta,phi to human
Human Identity “Verification” - not just human but what known human
Eventually, (10 years from now - I’m retiring in December), the bot should spend its “just got off charger” time cataloging unknown objects in its environment, and later when it sees I am eating or just sitting down at my desk, should ask if I have time to teach it some object names and attributes.
I really want to figure out how to get out of hearing “I die in 1 hour, recharge me please”, having to plug it in, come back four hours later, and press the on button to start another 6-12 hours of “life”. I think the robot community needs to get together and figure this out - standardize the dock, and contacts, charging circuitry, etc. It is a really hard problem that prevents robots from becoming independent.
These are very lightweight for their size / capacity. Two cells can provide 7.4V at 3500mAh. Four cells doubles this capacity to 7Ah. Unlike most other 18650 cells, these actually have a maximum capacity of 3500mAh (others might advertise that much but only be around 2Ah). We created a custom 11.1V pack using these cells: