


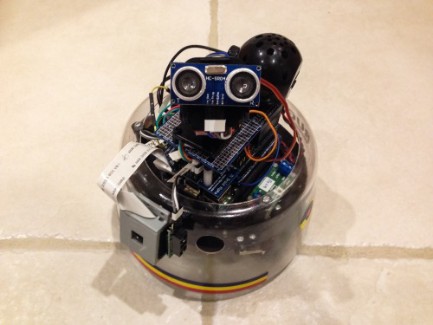
Pogo - RugWarriorPro With New Raspberry Pi 3 Brain
Pogo first sprang and sang “To Life” in my home in 2000, from a Rug Warrior Pro robot kit offered by AK Peters, Ltd. His original brain was a 2 MegaHz Motorola 68HC11 with 32K bytes of "non-volitile" RAM.
In 2015, at the age of 15, Pogo underwent a total brain transplant receiving a Raspberry Pi B+, and a year later, underwent a follow-up surgical upgrade to the 1.2 GigaHz, four-core, Raspberry Pi 3 with 1GB of RAM (60-100 times the processing power with 30 thousand times more RAM than the original Rug Warrior Pro 68HC11 brain.)
Pogo from the ground up:
- RugWarriorPro "Brawns":
- Du-Bro 2.5" Dia. captive-air soft rubber tires
- Autotrol 6v DC Geared Down Motor
- 4 C-Cell, and 2 C-Cell, Battery Holders
- 6" round non-conducting chassis
- Delron rolling ball “third wheel”/skid
- Full Skirt with six direction bump detection
- Added: Pololu 5V Step-Up/Step-Down Voltage Regulator S18V20F5
- Six 5000mAh C-Cells
- Raspberry Pi 3 - 1.2GHz Four-core Processor w/1GB RAM
- Brawns to PiDA Connection Card
- Mikronauts Pi Droid Alpha Robotics Digital and Analog Interface
- MCP3208 10-bit ADC
- MCP23S17 16 channel Digital I/O Expansion (with Interrupt Line tied to RPi GPIO pin 19)
- LM293D Dual H-Bridge Motor Driver
- Separate Motor Power Path (unregulated 7.2v)
- Separate Servo Power Path (4.8v Four cell tap off battery)
- SPI interface to RPi
- 2:1 voltage divider from 7.2v battery to ADC for 2 mv precision
- Top Layer Card (Mikronauts PiJumper)
- Pololu SP Power Switch
- ACS712 Current Sensor
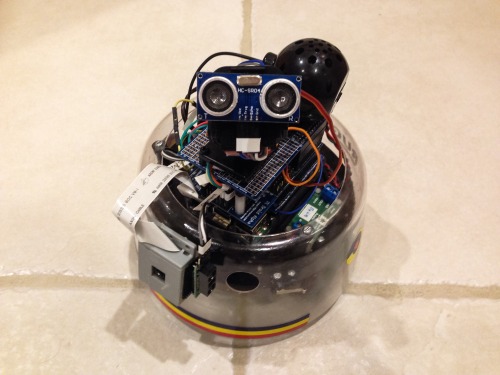
- Tilt-Pan Sensor Platform
- Twin SG90 Servos
- HC-SR04 Ultrasonic Ranging Sensor
- Rechargeable, wired, amplified speaker
- Sharp GP2Y0A60 Infrared Distance Sensor
- 10-150cm / 4 inches-5 feet Ranging
- Facing 90 deg left for wall following
- Non-linear analog voltage output
- PiCam
- Mounted at top of skirt facing forward
- Software:
- Hardware Interface Library in Python
- Hardware Interface Library in Python
Demonstrations and Test Code:
- Sphinx Speech Recognition
- Festival Text-To-Speech
- Class (with test main) for each sensor
- Class (with test main) for motors
- GoPiGo Python Function API (Partial)
- RugWarriorPro Function API (Partial)
- Battery_Life Measurement and Estimation
- 180 degree Ultrasonic Distance Map to console window
2017: After another SD card went to read-only, and finding the built-in WiFi of my Pi3 board had gone flackey, I managed to bring it to life on the latest Raspbian Stretch, somewhat. Here is my Raspberrry Pi3 upgraded Rug Warrior Pro robot running egret.py ("think alot, act a little"):
https://www.youtube.com/watch?v=X1hrGEDxV8w