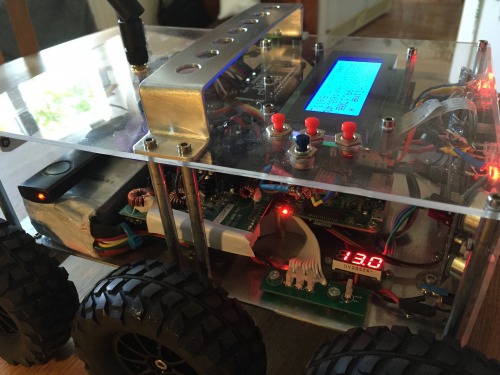
PiBot UGV Observer is an rover project that features sensors to scan the environment and wireless equipment to transmit data to the operator.
With camera and sensors able to measure the air quality levels, temperature, humidity, light intensity, UV, movement and other. The robot with an LCD screen attached sends data from sensors wireless to the remote control. This robot can operate by remote control or autonomously.
Parts :
1x Self made chassis
4x Chinese 12V gear motor 120RPM
4x modified brass hub with 4mm shaft hole
4x RC car wheels
4x Tamiya RC offroad rims CC01
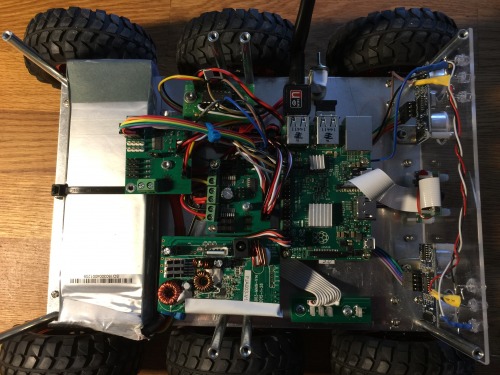
Electronics :
1x Raspberry Pi 2
1x PicoBorg Reverse
1x Enviro pHAT
1x UltraBorg
4x HC-SR04 ultrasonic modules
1x 12V 3A UBEC
1x 12v LiPo 12000mAh modified charger
1x Self made led setup with shift register HD44780
Nice robot! Got any videos of it in action in autonomous mode? How are you reading the SR04 sensors? Are they connected to the Pi, or is there a Hat involved? Is your Pi code written in Python? Care to share the code here? I’ve created a couple of similar robots, but they’re not quite as evolved as yours yet.