Art_and_Science_of_Selecting_Robot_Motors_-_FinalV2.pdf (1657321Bytes)
Building a robot is not always easy, especially if you don't have any previous experience or people to help you or guide you. LMR is in a perfect place to help others online and the more tools and tutorials a user has access to the better. We've put together a few over the years and if you know of any or even want to make your own, add them in the comments, and we'll add them to the main post. We'll also take a look on LMR to see if this type of comprehensive "Tools & Tutorials" post has been done before and integrate them all into a mega post.
|

|
How to Make a UAV / Drone Tutorial Series
So you’re looking to get into drones and UAVs? This tutorial series is designed to help you understand the emerging field of UAVs and guide you through the process of building your own UAV using off-the shelf parts.
|
|
|
How to Make a Robot Tutorial Series
This is series of 10 lessons that will teach you how to make your own custom robot and is aimed at anybody willing to get started in robotics and have a basic understanding of terms such as “voltage”, “current”, “motor”, and “sensors”.
|
|
|
Drive Motor Sizing Tool / Tutorial
The Drive Motor Sizing Tool is intended to give an idea of the type of drive motor required for your specific robot by taking known values and calculating values required when searching for a motor.
|
|
|
Robot Arm Torque Calculator / Tutorial
The equations used in the calculator are used to determine the torque required at any given lifting joint (raising the arm vertically) in a robotic arm are presented here. The totorial explains which equations are used and why.
|
|
|
Robot Leg Torque Tutorial
The Robot Leg Torque Tutorial explains how to find the torques acting at each degree of freedom of a 6-legged (hexapod), 3DOF / leg “insect” robotic leg.
|
|

|
Common Unit Conversion Tool
A short list of common units which are used in robots; useful in that it only shows the most common units which are used by most robot-related products. Converts between metric and imperial values as well.
|
|
|
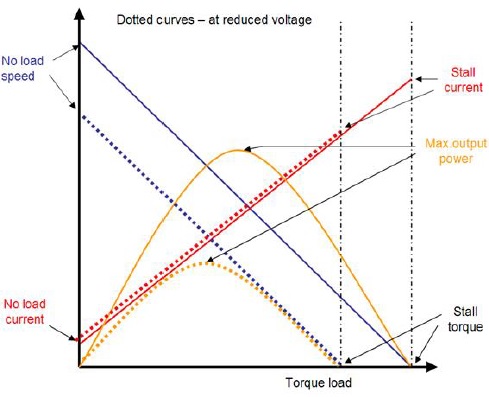
Art & Science of Motor Selection (by John Piccirillo, Ph.D.)
Selecting drive motors for a mobile robot is no simple matter. One may do it by guess, trial and error, or someone’s advice. Having relied on all these methods in the past, with mixed success, John Piccirillo, Ph.D. set out to find a better way.
PDF Download
|
… more to come and suggest your own!
| |
Simulators
Retarding the Torque articles:
- Are there simulators available to test designs prior to building?
- I suspect that all motors have slightly (or greatly) different operating charismatics. How to compensate?
- Online calculators where I just fill in weights and lengths?
I like the whole idea
I think the motor sizing will help a lot of people. I’ve seen that sort of question often.
When I was calculating the torque/power/speed requirements of my quadruped I looked around for material on this and found nothing. Making it easier for people to predict whether their project will work and what torque/speed is needed would help a lot of people get their project to actually work.
Which calculators don’t you have? These days, it’s not so hard to write these in HTML5 and SVG to visualize, I have done so for some of the calcs…
Ideas for tools
Although the leg sizing tutorial is complete, we have not yet put together a dynamic tool to calculate the values automatically for each of the three leg joints.
As far as other ideas go, we have not yet made a tool to calculate thrust for a motor + propeller combination (although they are available online on other sites).
Some tools which help automatically create or adapt code (in some way shape or form) would be useful.
If people have found useful tools on other sites, we can link to them here.
Simulators
Aside from Microsoft’s ROS software (where you can virtually build your robot in a 3D environment) and perhaps a few others, creating a complex robot virtually is still quite hard (programming wise), especially given the range of parts which can be used.
The Drive Motor Sizing Tool is not as complex as it could be, so it’s there to give an idea of the torque and RPM range. We could potentially create one which has even more details, but would therefore also have more unknowns, making it quite a bit harder for beginners to use.
As for units / weights; we created one with some common units, but open to others which are oriented to robotics.
Tools
As far as creating code, we already have Scratch and Flowbotics. I don’t see making a new tool as being an easy task, and cross platform even harder.
What I suggest instead is “compiling” a library of Arduino sketches that are tuned for various robotic endeavors. It’s very easy to add a library and open a sketch in the Arduino IDE. You also have a huge Arduino community and forum.
Very optionally then:
If you were to do that then what is possible is to store away the various sketches in a database. The front end of that would then live on the web. You would choose a project and what accesories that would have, that would generate forms for each “section” with a default and the range of possible values for each of the variables.
Now some preprogrammed intelligence is necessary as some of this could be dealt with in a loop and some under a timer or an interupt and some combinations are not possible.This is doable though.
The end result would be a sketch (with variables inserted and described and marked) that could be pasted into the Arduino IDE, and a list of modules and links to them that need to be loaded.
Not a trivial project, collecting the “parts” and testing would take some time. Programming it, not so much.
I wouldn’t put it on your “do” list, but since you asked, that is how I see that it would work.








