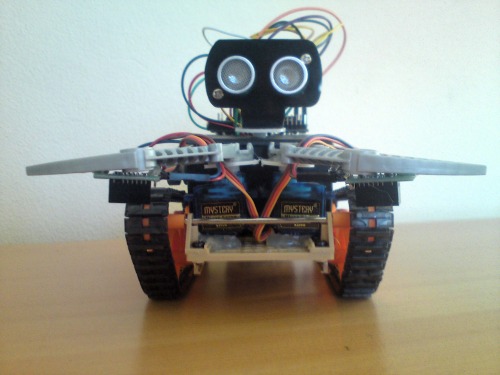
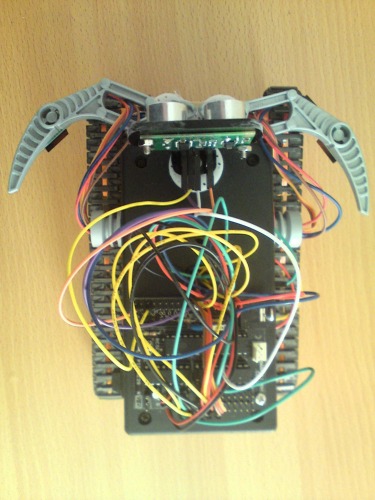
This is my first robot, I built it five months ago, but I havan't had the time to smubmit on LMR. It uses an srf05 to avoid objects and two infraed sensors to detect edges. I made the head using perspex and used some Lego parts for the Chassis.
Thanks, the “arms” were from an old LEGO toy I had lying around.
The code doesn’t make any use of the mobility of the IR detectros. The reason I made the arm this way was because my Electronics teacher gave us a limite on the size of the robot, it had to be less than 17mm X 17mm. The IR detectors had to be at leas 5 cm away from the robot, for it to be able to avoid edges and sence my robot was already 16.5mm long, I had to think of a way to break the rule “without breaking the rule :)”, and thats when I came up with the idea of using two servos to extend the arms that hold the IR detector when the robot is turned on.