



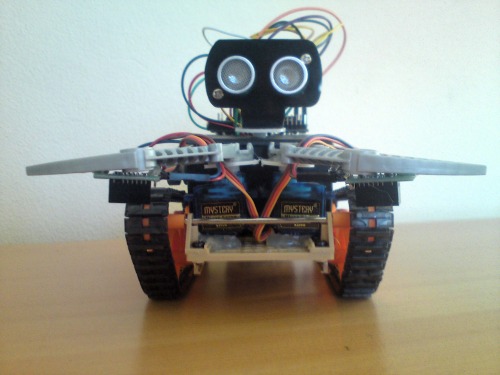
Obstacle and edge avoiding robot
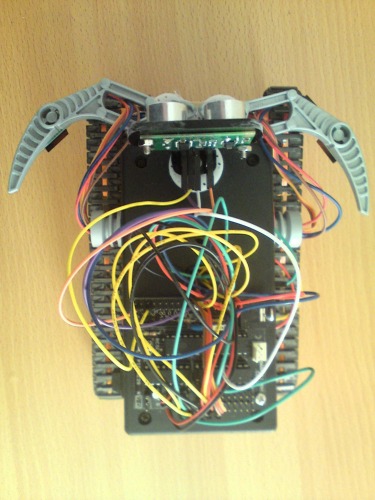
This is my first robot, I built it five months ago, but I havan't had the time to smubmit on LMR. It uses an srf05 to avoid objects and two infraed sensors to detect edges. I made the head using perspex and used some Lego parts for the Chassis.
- Actuators / output devices: Tamiya twin gearbox, 2x Micro Servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 AA batteries
- Sensors / input devices: Sharp IR, SRF05 Ultra Sound