This is not the first robot I made but the first one I was successful with programming in RobotC.
The second video I used the sample program's and blutooth with a gaming control to control the robot. It dies by low battery at the end of the video.
You can download the C file that is like a sample from me to you.
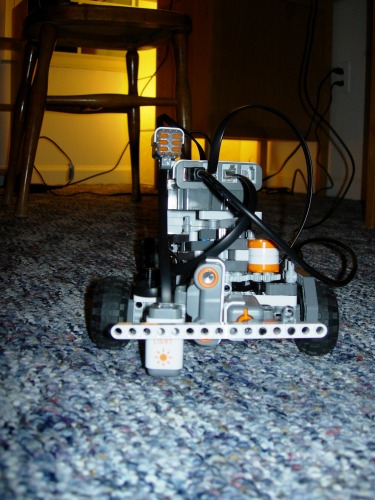
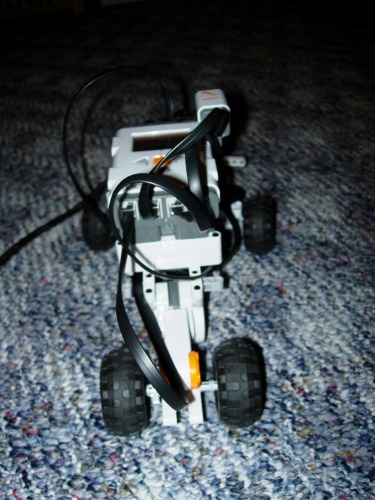
Steering robot that moves around.
Actuators / output devices: Nxt motors
Control method: autonomous
CPU: LEGO MINDSTORMS NXT
Operating system: windows XP, Windows vista
Power source: 6 AA batteries
Programming language: RobotC
Sensors / input devices: NXT light sensors, NXT ultrasonic sensor, NXT sound sensor, NXT touch sensor
Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/nxt-car-programmed-in-robotc
mike
January 11, 2009, 6:33pm
2
Sonar
Why did you mount the sonar in the vertical axis rather than horizontal?
Mike
Because
Because it was hard to make it horizontal so i choosed to make it vertical, plus I have seen some difference when testing the sonar on thin stuffs like a chair’s leg.
/Emil Hemdal (SWE)
lolgeek
January 12, 2009, 12:16am
4
Need more video time.
School is interupting
I havent come so far and now its a school week with lots of test so the robot project is not going to be worked on at the moment.
/Emil Hemdal (SWE)
Starting from scratch
This robot has brougth me alot of fun but now I’m probably going to mak a “drum robot” that follows the controllers buttons.
You can take any ideas you got from here without asking for it, you dont have to leave credit.
/Emil Hemdal (SWE)
**Good idea **