No2 is a little robot created to play around and learn. It´s small on purpose and lets me focus in things I need to improve after BlueFarAway, like coding and electronics. Mechanics is resolved though Pololu´s chassis and ball caster. My plan is to have a functional code for obstacle avoidance (as shown in the video), line following with PID control (wip) and maze solving (not yet started). I understand these three scenarios are nice learning exercises :)
On the electronics side I tried to provide modularity so many functions can be implemented. As for the mechanics I tried to keep it as small and simple as possible with the ability to morph into different configurations.
Hopefully it will become my proof of concept robot for future learning scenarios and will be an eternal draft!
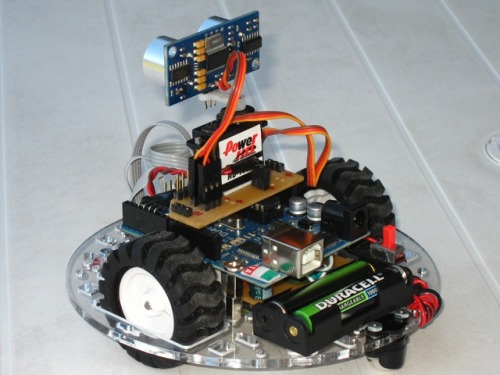
The configuration shown in the pictures includes all the power management and motor control in separate module (under Arduino) and the Ping))) module with a little servo to control the direction of the sensors. More modules are planned, like voice prompt and LCD + input buttons.
This is the view of the controller board:
This is a view from the buttom with the batteries:
There´s still a lot to do :)
Avoids obstacles, follow the line and solves mazes
I noticed that the micro servo isn’t turning all the time, which seems like it would help in power efficiency. The 1:100 geared motors look like they provide a good traveling speed withiout being exessive. Did you use PWM for speed control?
Very clever designed robot. Can you please add more pics and some explanation about the choosen motor controller and how you connect the line sensors to the controller (port expander or direct, analog or digital).
Yes, the robot will measure the distance and decides based in 2 thresholds; A critical low distance and a safe distance. On the low critical distance she will rotate back 90°, measure and continue. But if the distance is safe enough to make a turn moving forward she will do so. This smothers the path and provides an extra protection against bumping. As seen in the video sometimes the distance is not measured correctly and she gets to the point of critical distance, but overall she has a good performance.
The motors are fine in speed and really good for PWM control. They can keep the pace even with low rates of PWM and have accurate metal gears. I like them!
For this robot I chose a TB6612FNG Toshiba motor controller as it´s small and fits perfectly in the controller board. It has all the typical features for a dual H bridge functionality and the nice looking appearance of SMD J. But it could perfectly be replaced by L293D or equivalent IC.
In this particular scenario I used small spacers between the Arduino and the chassis to keep a low profile (only for aesthetic reasons) and this left little space to accommodate the controller board. If I were to design this board again I´d probably go with the L293D as is cheaper and uses the same space.
As for the sensors I chose Pololu´s QTR-A (http://www.pololu.com/catalog/product/960). I broke the card to leave 6 sensors but I currently use only 4 of them connected to Arduino´s analog inputs. Chose Analog version since digital pins are all allocated for other functions like LCD, Servos, encoders, voice prompts and some other modules I have in mind.
What a clever program! It makes very smooth turnes and reacts very clever . May I ask what kind of motors you used. Are those the ones from Sparkfun? Those gearbox motors? And how did you get the Arduino running with only 2 AA batteries?
I´m using Pololu micro motors with a 100:1 metl gear box. With this ration you don´t get much speed, but are nice for PWM control. You can find them here: http://www.pololu.com/catalog/product/992
In fact I have 4 AAA batteries, two of them are located bellow the chasis. But if you want to run Arduino with only 3v you may use one of these: http://www.pololu.com/catalog/product/799 but kep in mind how often you´ll need to change your batteries
I´ve noticed that you and I are geographically close to each other, but far away from nations were this hobbies are more common. This brings me to my question: How do you buy parts, kits and components? I specifically refer to those not available locally. Do you buy them through the internet and have them shipped to you? I know this is often not easy. Maybe you know of a better way. Let me know… and cool robot, BTW!
Sure, it´s complicated to get parts in Argentina, there´s no much around
But still the people from http://ditentec.com.ar/ have stock on Arduinos and other parts. They recently added motors and sensord from Solarbotics and they can import other parts by appointment.
I´m bringing parts from USA as I go there from time to time.
I never tried to order via mail, i guess customs will tax like hell! Maybe it´s time to give it a try!
I get my parts from Robotshop and have them mailed to me. If you stay below a certain size, weight and cost they will not tax it. What they will do, however, is have you pick it up from the post office in downtown Retiro. Thanks for the info on Ditentec. I have never heard of them before. I will check them out.
I am a beginner, you can please explain in detail what you used and possibly how to make the control board, in any case you could do a detailed explanation of what it takes? Thank you very much.




 . May I ask what kind of motors you used. Are those the ones from Sparkfun? Those gearbox motors? And how did you get the Arduino running with only 2 AA batteries?
. May I ask what kind of motors you used. Are those the ones from Sparkfun? Those gearbox motors? And how did you get the Arduino running with only 2 AA batteries?