



No2 (Updated)
<added basic Maze Solving video>
<added wii nunchuk control video>
<added line following video>
No2 is a little robot created to play around and learn. It´s small on purpose and lets me focus in things I need to improve after BlueFarAway, like coding and electronics. Mechanics is resolved though Pololu´s chassis and ball caster.
My plan is to have a functional code for obstacle avoidance (as shown in the video), line following with PID control (wip) and maze solving (not yet started). I understand these three scenarios are nice learning exercises :)
On the electronics side I tried to provide modularity so many functions can be implemented. As for the mechanics I tried to keep it as small and simple as possible with the ability to morph into different configurations.
Hopefully it will become my proof of concept robot for future learning scenarios and will be an eternal draft!
The configuration shown in the pictures includes all the power management and motor control in separate module (under Arduino) and the Ping))) module with a little servo to control the direction of the sensors. More modules are planned, like voice prompt and LCD + input buttons.
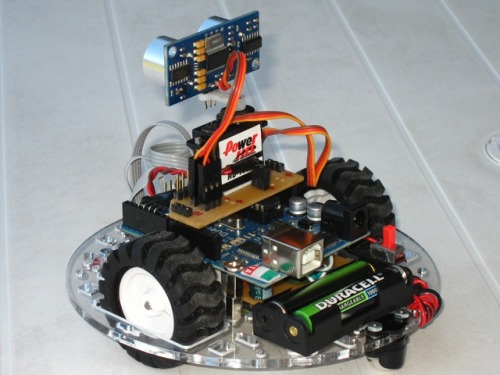
This is the view of the controller board:

This is a view from the buttom with the batteries:

There´s still a lot to do :)
Avoids obstacles, follow the line and solves mazes
- Actuators / output devices: 2 Pololu 1:100 micro gear motors, 1 micro servo
- Control method: autonomous
- CPU: Arduino Duemilanove (328)
- Power source: 4 x AAA rechargeable batteries
- Programming language: Processing
- Sensors / input devices: PING))) sonar and QTR 6
- Target environment: indoor