My first robot was an autonomous rover based on the "Start Here" robot. So this time I wanted to go one step further and make something different, write my own code and do everything my way.
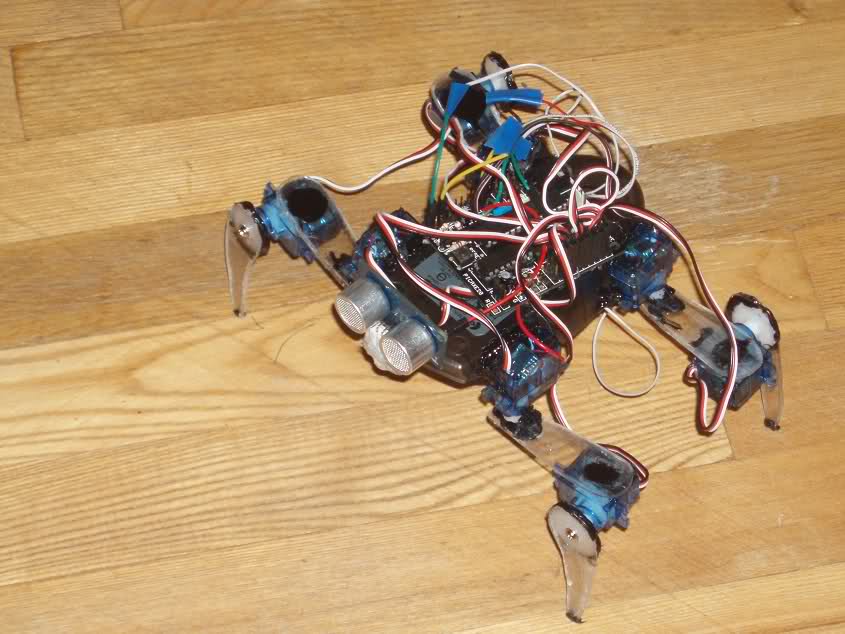
At the begging my plans were to make a 6 legged robot, but since picaxe 28x1 has only 8 outputs I went for 4 legged one.
My biggest concern was that a 4 legged bot would fall everytime it lifts its leg, but fortunately it does not.
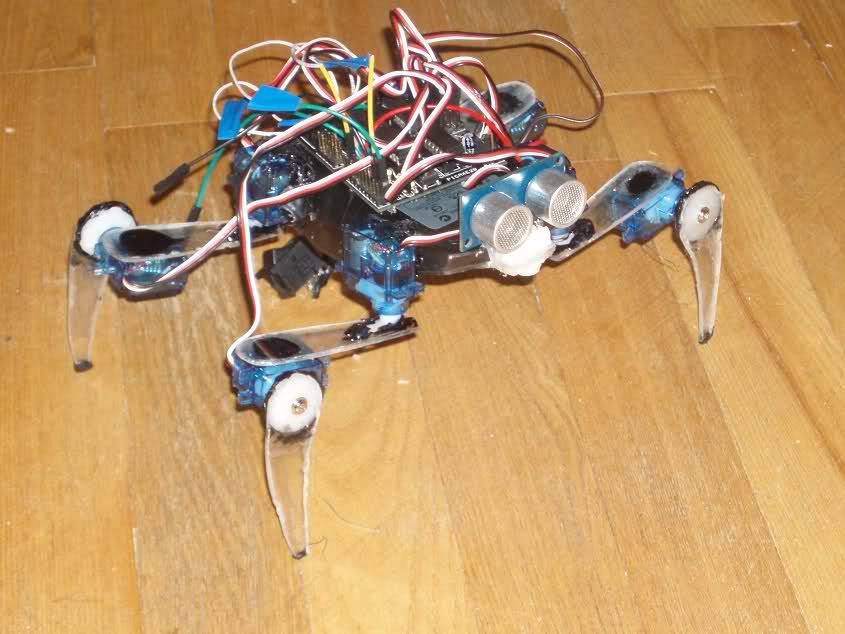
Chassis is made from an old mouse, legs are cut from organic glass.
Servos are the cheapest ones you could find on the market, but they do their job.
That's it. Comments/advices are appreciated. Thanks.
At the time, when video was shot it just stopped, but now it turns to the better direction when an obstacle is detected. The disadvantage of such thing is that it takes some time for the robot to turn.
Problem occured!! Without the SRF005 sensor, the robot walks just fine, but when it is connected, the servos start doing nasty stuff. For example, randomly all the servos start to turn into one direction.
Can the srf005 ultrasound signals be the problem? If so, how may this be fixed?
"I did not have a fresh SRF05, and so there are drilled extra holes and soldered pins on the one on the picture.
Be aware that if you also connect servo(s) to the same Picaxe chip, program execution may be bumpy with little iregular breaks when using things as the SFR05 that needs pulses. If it is important for you to have a steady program execution, or if a servo acts totally irrational, it sometimes helps to have a smal pause or turn off a servos pulse for a short time in the code:
“low 3” or “pause 10”. Aparently there is no system, it is just trial and error with your particular setup." FRITS