


My second work - 4 Legged Robot
My first robot was an autonomous rover based on the "Start Here" robot. So this time I wanted to go one step further and make something different, write my own code and do everything my way.
At the begging my plans were to make a 6 legged robot, but since picaxe 28x1 has only 8 outputs I went for 4 legged one.
My biggest concern was that a 4 legged bot would fall everytime it lifts its leg, but fortunately it does not.
Chassis is made from an old mouse, legs are cut from organic glass.
Servos are the cheapest ones you could find on the market, but they do their job.
That's it. Comments/advices are appreciated. Thanks.
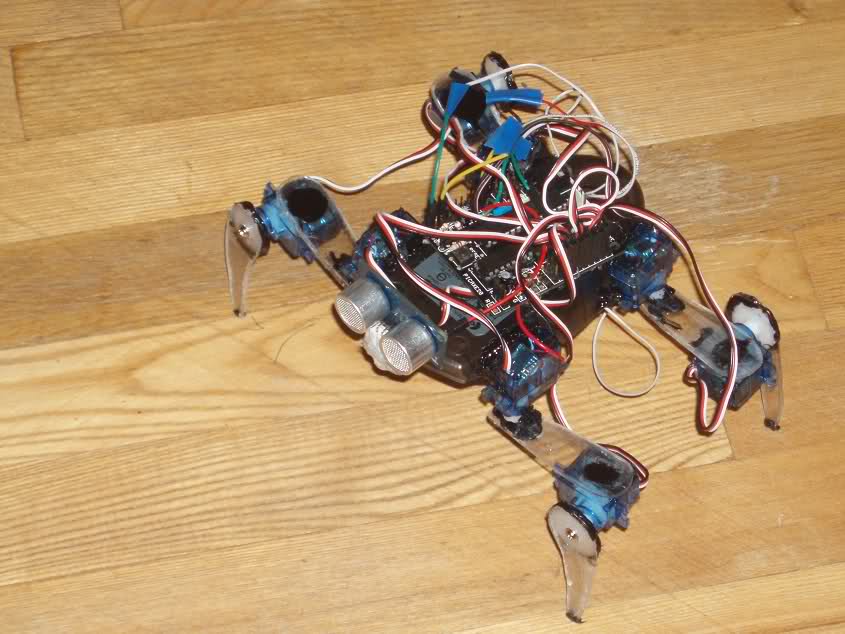
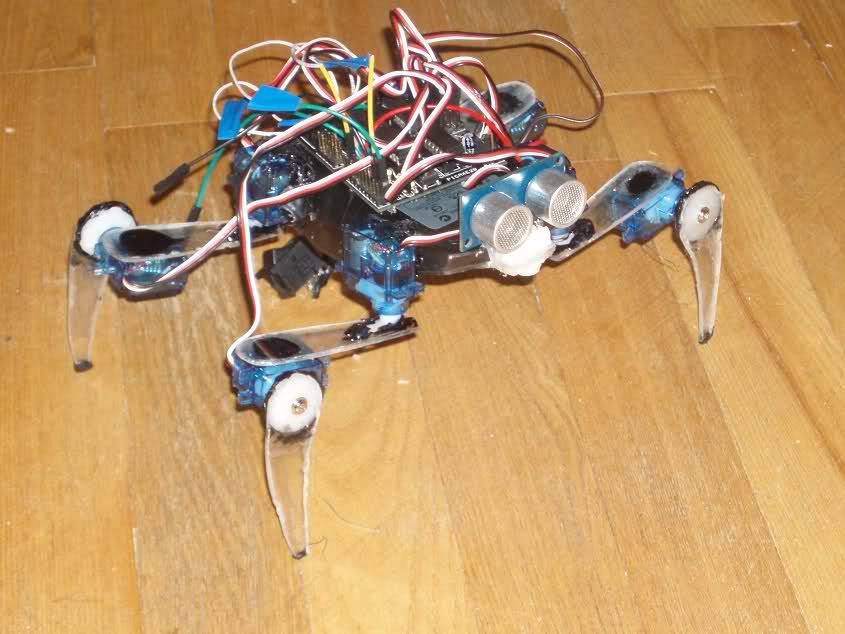
Navigate around via ultrasound, uses 4 legs to walk
- Actuators / output devices: 8x cheap micro servos from china
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 3 AA cells
- Programming language: Basic
- Sensors / input devices: SRF005
- Target environment: indoor