I'm not sure if adding a switch directly on the power wire is the right thing to do, but it works :)
Also i wasn't too sure about wire sizes. I have been robbing wires and connectors from old PC's and stuff around the house :) The wires on the motors are hard drive power wires. They seem a bit thick, will that make less power get to the motors? The wire from inside CAT5 seems quite good, would that work for these sort of projects?
I tried to use plugs and connectors where I could so I could easily change things around.
An important lesson I learned was planning the layout of your parts. I found it takes 2 seconds to stick a motor or sensor in place with doublesided foam tape... It takes 5 minutes to get it off and remove the tape when you stick it in the wrong place! :)
Any how, My first robot and my first venture into the land of forums too, so please be kind :)
Thank you to Frits for the tutorial and everyone who commented there Great job !
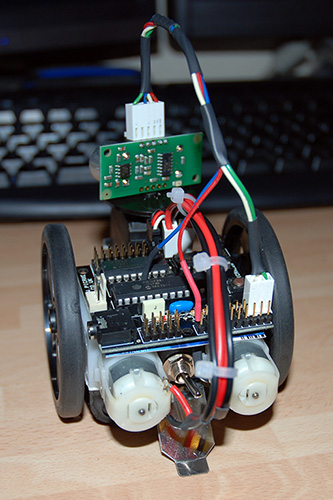
Uses Ultrasound to navigate as per the Tutorial code
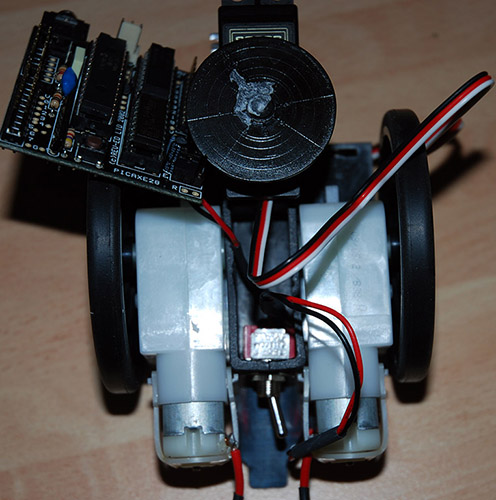
Actuators / output devices: 1 x servo 2 x geared motors
Thank you! Thanks for the comments and the tips I already snapped a few single core wires at the joints and i hadnt though of the problems that would cause if the break were hidden in the insulation. I did start to modify the code from the tutorial, but I am struggling a bit. So I think I will go back to the very basics and start from the ground up using the tutorial as reference. Once I have it wandering again I will post Video
Could you email me the source code you refer to in your description, I want to implement it into my circuit, I want to get some type of guideline with the code for the ultrasonic sensor.
Please join LMR because you want to share and take part… or get lost.
You are extremely close to a flame & getting kicked out for spamming and bad karma.
You are VERy welcome to join LMR if you are joining. NOT if you are just asking to get stuff out and move on. Post something, be a real member, or get lost!


 (And video!)
(And video!)  I already snapped a few single core wires at the joints and i hadnt though of the problems that would cause if the break were hidden in the insulation. I did start to modify the code from the tutorial, but I am struggling a bit. So I think I will go back to the very basics and start from the ground up using the tutorial as reference. Once I have it wandering again I will post Video
I already snapped a few single core wires at the joints and i hadnt though of the problems that would cause if the break were hidden in the insulation. I did start to modify the code from the tutorial, but I am struggling a bit. So I think I will go back to the very basics and start from the ground up using the tutorial as reference. Once I have it wandering again I will post Video