



My first Robot! Looks familiar!
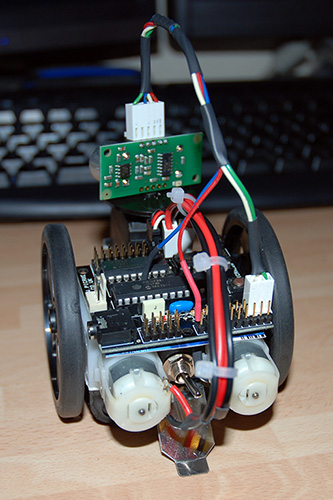
My first Robot, made with the "Start Here" project :)
I added a switch in the little box between the motors which houses some of the wires.
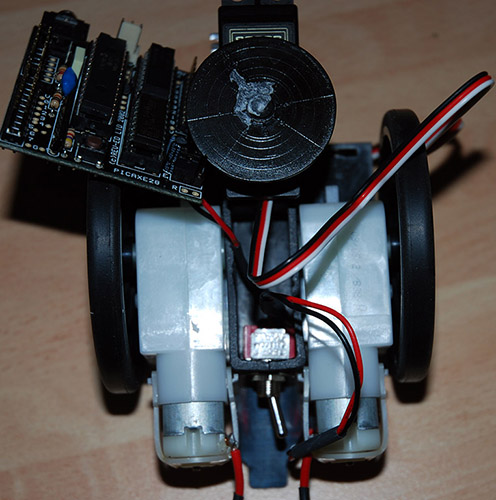
I'm not sure if adding a switch directly on the power wire is the right thing to do, but it works :)
Also i wasn't too sure about wire sizes. I have been robbing wires and connectors from old PC's and stuff around the house :) The wires on the motors are hard drive power wires. They seem a bit thick, will that make less power get to the motors? The wire from inside CAT5 seems quite good, would that work for these sort of projects?
I tried to use plugs and connectors where I could so I could easily change things around.
An important lesson I learned was planning the layout of your parts. I found it takes 2 seconds to stick a motor or sensor in place with doublesided foam tape... It takes 5 minutes to get it off and remove the tape when you stick it in the wrong place! :)
Any how, My first robot and my first venture into the land of forums too, so please be kind :)
Thank you to Frits for the tutorial and everyone who commented there Great job !
Uses Ultrasound to navigate as per the Tutorial code
- Actuators / output devices: 1 x servo 2 x geared motors
- CPU: Picaxe 28x1
- Power source: 4 x 1.2v
- Programming language: Picaxe basic
- Sensors / input devices: SRF05 Ultra Sound
- Target environment: indoor flat surfaces