I built this robot from simply learning to use ROS.
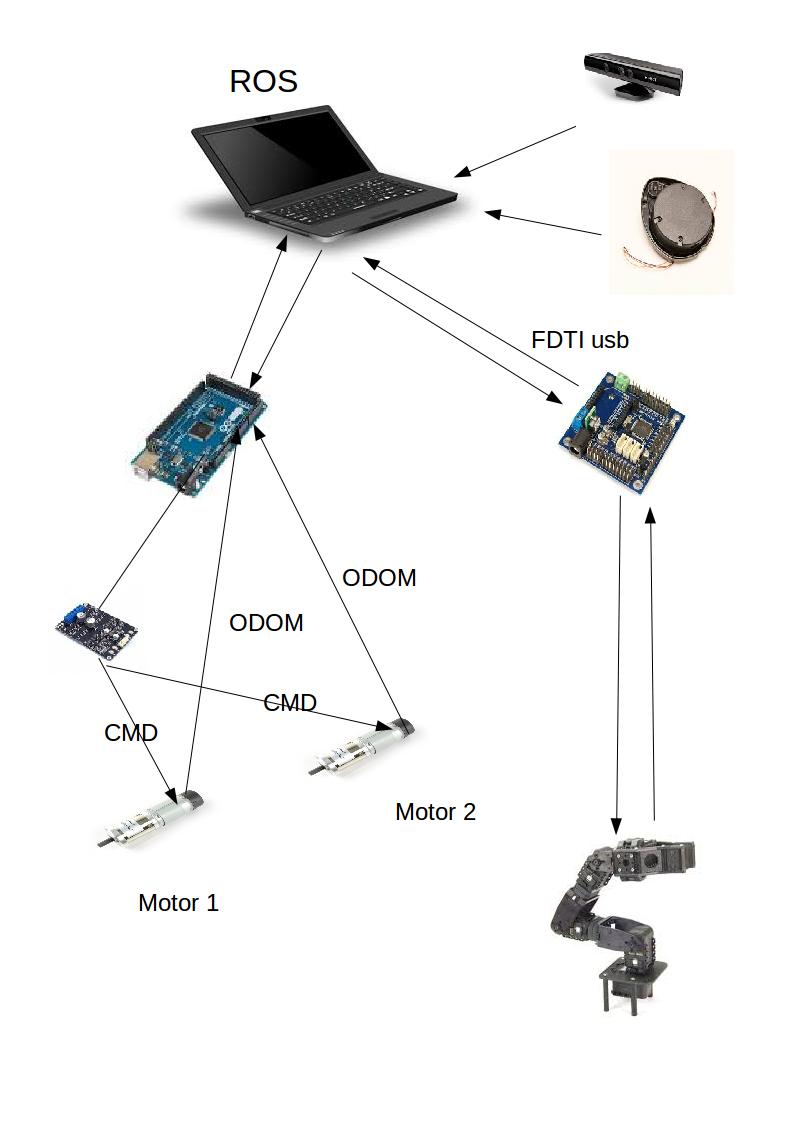
the biggest challenge was to create the controller for "odom and motor drive" but i found a lot of help with the project rosserial and ros arduino with python.
when you begin to understand ROS, many door opens to you.
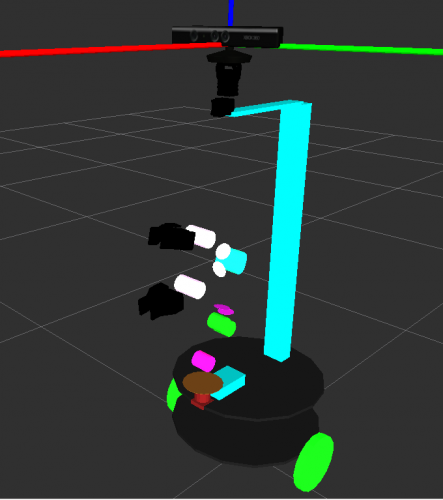
my robot is an autonomous robot based on ROS ARDUINO
he has the capasity for navigation and exploration by itself everywhere it is also able to interact with an arm 7 dof, pick of objects and pose another point,track some art
code with kinect we can also control with android phone
Please post details about the build such as mechanicals, motors, batteries, and sensors. Your video clearly show a great deal of success. I would like to know more about how and why you did it. Thanks for posting.
I have been playing with ROS over the last few months, and you have done exactly what I have been trying to do with the navigation package. I have found it frustrating but fun as well learning about all the different packages and what can be done with them. For instance, the stereo odometry package (visio2) using 2 cameras looks very interesting. I hope to do that once I have the navigation actually working. Right now, I am in the URDF hole trying to get a model that describes my robot and will appear in Gazebo and rviz something like it does in reality. The documentation on what all the URDF fields are and how they relate are pretty scant. My bot is a circular bot like yours, but I am not able to get the wheels to look or act right.
I appreciate the direction of looking at ROS Serial and ROS Arduino. Any other suggestions, online resources or help would be appreciated since you got this all working. Great work.
A few questions:
What are you using to control it with your Android phone?
What other resources did you find that were especially helpful in getting this working?
Do you have a github repository of what you have, so I could take a look?
its cost me 300 euros but be careful because the duration of life is quite short.
I advice you to use the Kinect the most common case and kept the lidar for using in the complex situatiuon. my first died because I forget to turn off for 3 days
for information I had to stop urdf for gazebo because it is not easy to define the information : the mass and inertia and we have tools that do this better than we do :) Solidwork.
I’m not sure we need gazebo if it’s just a prototype robot .The most important for me is that the robot work well and urdf is clean for MOVEIT.
Excellent work - I have been considering learning the ways of ROS but couldn’t think of a platform to warrant its use. I may have to steal some of your ideas
I have next week off and hope to spend some time with ROS. I will definitely checkout those links.
I took a quick look and that is so cool you can control everything by creating a .yaml file. Pretty straight forward by the looks of it. I wasn’t aware of that or I might have gone that route…
The more I play with ROS, the more I like it. It forces you into an architecture which makes it easy to separate concerns, to make the robot testable as well as the package functionality and tools which come with it. I do not have Solidworks, so will have to play with Gazebo and get the urdf working.
Congratulations on getting it all working. It is quite an achievement getting the navigation to work; I can attest to that!
Absolutley brillant robot!!! The best I’ve seen in a long time!!! I love ros, I love arduino, I love even more stuff as well. So far your robot seems to incorporate the most stuff I like in a while. Also just wondering could you document the build process? I just wish you could document that a little bit better. It is okay if you don’t have any pictures that doesn’t matter as much as words do. It needs a better description other than that it is absolutley fantastic!!!