



My first autonomous robot with ROS INDIGO
introduction
I built this robot from simply learning to use ROS.
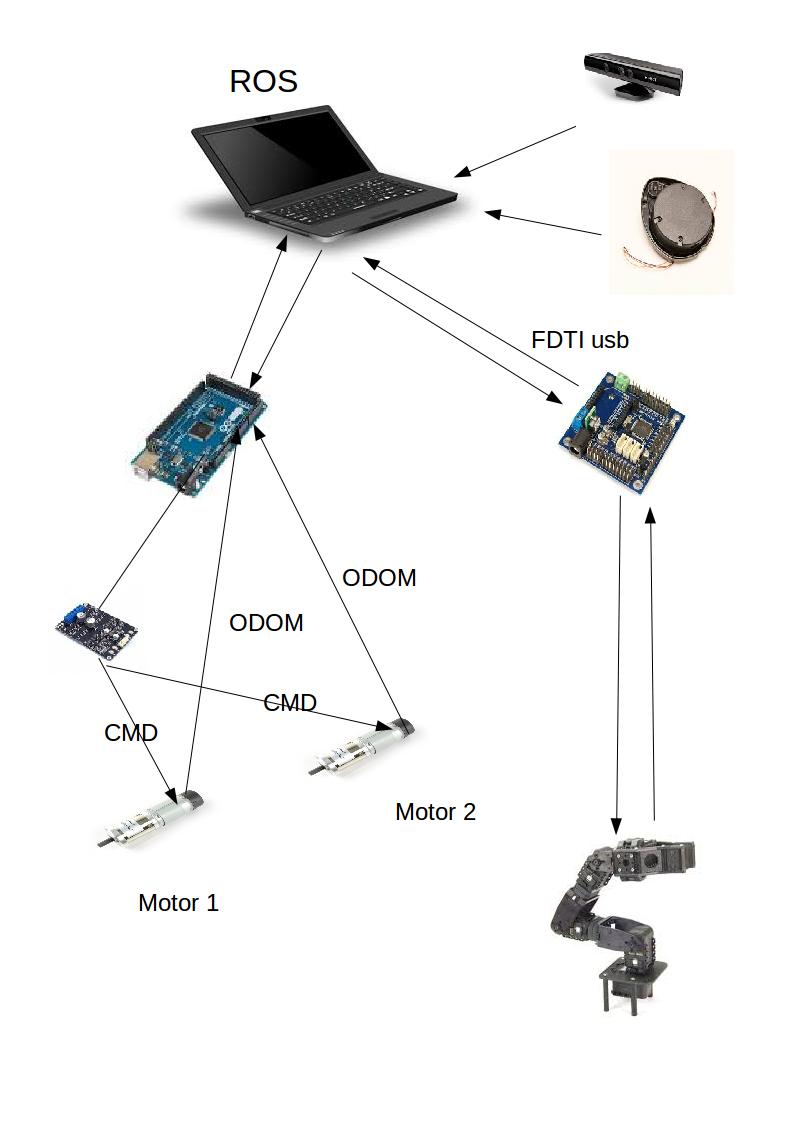
the biggest challenge was to create the controller for "odom and motor drive" but i found a lot of help with the project rosserial and ros arduino with python.
when you begin to understand ROS, many door opens to you.
my robot is an autonomous robot based on ROS ARDUINO
he has the capasity for navigation and exploration by itself everywhere it is also able to interact with an arm 7 dof, pick of objects and pose another point, track some art
code with kinect we can also control with android phone
List of materials and components:
Arduino Mega2560 i am using pin interrupts 2,3,18,19 for odometry |
Arbotix controlor for the arm , head and gripper |
Scanner laser 360 rplidar xv11 |
Kinect for PCL « pick and place » |
12V Silent DC Motor 146RPM w/Encoder 2400 steps per revolution
|
2 dc motor driver 10 A-25V dual channel |
Batterie externe 19v 18,000mAh
|
Dynamixel 4*MX64T + 2*MX12+4*AX12 |
For IMU MultiWii 328P Flight Controller w/FTDI DSM2 Port |
module ftdi |
pick and drop navagation tracking
- Actuators / output devices: Servo motors
- Control method: autonomous
- CPU: laptop Asus core i5 2.2 GHz + PIC18F4550 controller
- Operating system: Linux, ROS
- Power source: 12v
- Programming language: Python
- Sensors / input devices: video camera, IMU sensor, Scanning Laser Rangefinder, The Kinect sensor
- Target environment: indoor, Out door