This is a robot that I am working on for my robotics class at school. At the end of the quarter, it will have to do hide and seek, tag, line following/endurance, and tug of war. Since some of these requirements conflict with each other, the trick is finding a happy balance that will win the most events. As of right now, all it does is demonstrate that it can move forwards/backwards/turn, but sensors will be added to it soon. Right now, the wiring's a little messy, but it will be cleaned up once everything is put on the robot.
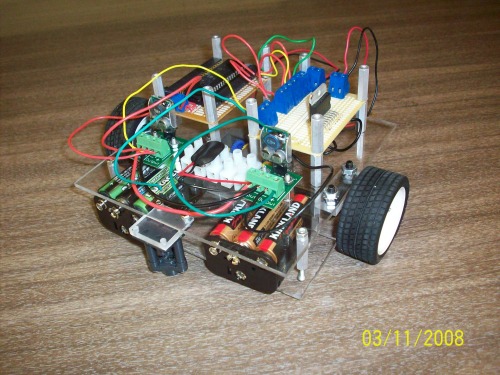
11/7/08
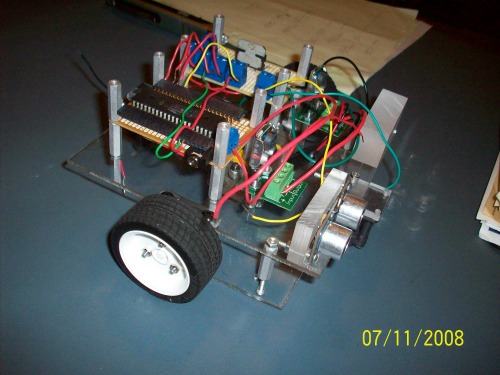
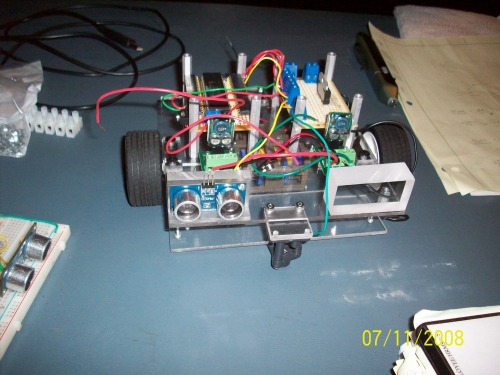
We're finally at the point where we can start putting sensors on the robot. In order to put the sonar sensor on, I had to machine some mounts for it. Here are some pictures of the first mount. The second one will be made soon.
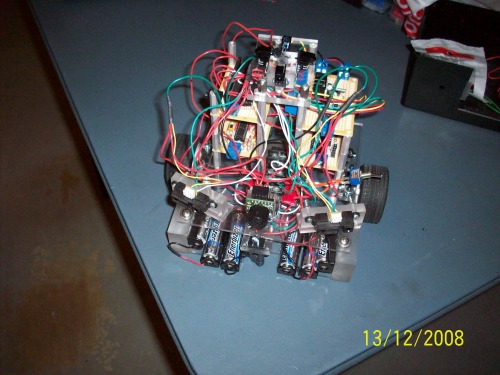
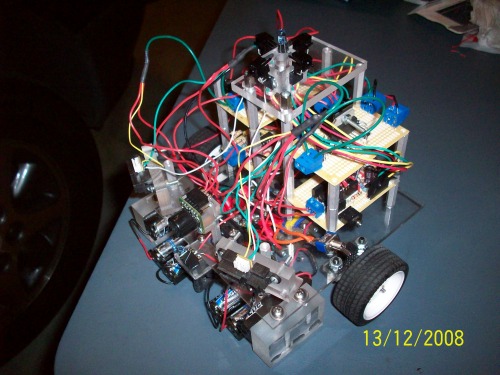
12/13/08
This is the "finished" robot. Most of the wiring was done the night before the competition, so it got a little messy. The final configuration uses two Sharp infrared sensors and a Maxbotix sonar sensor in the front. On the top are four infrared detectors. The other robots in the competition were supposed to emit an infrared signal so we could find them for the hide and seek and tag competitions. We got the detector module to work, but we didn't have time to make the robot smart enough to tell the difference between the infrared signal we were emitting, and the other robots. As a result, we (very successfuly) had to rely on blind luck in order to make our robot to find and tag the other robots. (Did I mention that we ended up finding every robot? Haha) The gear ratio was also changed to make it faster, and the battery packs were changed to use two sets of 4.5V battery packs. I'll upload a video of one of the competitions soon.
Obstacle avoidance, tag, hide and seek, tug of war, and line following
- Actuators / output devices: Tamiya 4-speed dual gearbox
- CPU: PICAXE 40X1
- Power source: 12X AA Batteries
- Programming language: Basic
- Target environment: Multiple environments
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/multiple-purpose-robot
Thats a pretty sweet bot,
Thats a pretty sweet bot, and looks to have quite a few tricks that you can do with it, but I’m curious about the power requirments? Are you routing one pack to the motors and one to the proc? Are they combined(18v)? Have you run into any runtime issues due to the weight with the extra battery pack?
Battery Packs
The final configuration will most likely have two sets of six AA batteries in parallel with each other. With 1.5V AA batteries, that’s the equivalent of having a big 9V battery pack. The processor uses a 5V switching regulator, and the motors use a 3.3V switching regulator. (If you don’t know what a switching regulator is, it is a regulator that can get around 80% efficiency.) If you look at the video, I am actually running on only one battery pack, but the other battery pack is still on the robot. In that configuration, the robot can last 1.5 hours. But with the extra battery pack actually connected, I suspect that I will be able to get more than 3 hours out of the robot for the endurance event. The reason behind this battery configuration is because batteries are most efficient when you draw less current from them. So if you draw current from two battery packs, we get more out of them. Of course, you have to worry about whether or not the extra battery weight is worth the extra amount of power you get in return. That is a test that I still have to perform.
Efficiency
That really looks like a superb experimental platform! Very functional and loads of room for expansion.
Tell me more about the efficiency of drawing less current. I had the impression that a 1000mAh battery could source 1A for 1 hour. The logical extension being that two of them in parallel would last for 2 hours at 1A.
I agree that batteries are most efficient when you draw less current, but are they actually MORE efficient when you draw less current? This seems to be the implacation of your assertion that 1 pack will last 1.5 hours but that two in parallel will last more than 3 hours.
I’d be keen to look at a reasonably technical article on the notion.
40X2
Look pretty good. Very clean setup.
Where did you get the picaxe 40X2? i read about the 28X2 and the 40X2, but I can only find the X1 variants in the online stores.
40X2
That was actually a typo. I’m actually using a 40X1 from sparkfun.com. Sorry about that.
Nice robot!
That is a great robot! It is certainly a lot more grounded and practical than mine for a general purpose bot 
What switching regulators are you using? I have to pipe a proper 5v feed around my bot soon, and using 3 7805s is not the most efficient way…
Cheers,
Robert
Regulators
Unfortunately, the 7805’s are very inefficient, especially if you’re inputting a voltage that’s significantly higher than your output voltage. I got my switching regulators from http://dimensionengineering.com/. They’re not cheap ($15.00 each) but they’re very efficient compared to the regular regulators, and they have built-in filter capacitors.
Thanks
Thanks for the link, I looked at the site, and at your bot’s photo, I guess you got them with the break-out boards?
$15 is not cheap, especially when converted to AUD at the moment  - I guess, if you are using Alkaline batteries, the efficiency increase would make up for that initial cost after a relatively short while, simply by extending the run-time per set of batteries. This has a both a financial benifit, and gives the bot in question more of a chance to hit something (well, at least in my experience…)
- I guess, if you are using Alkaline batteries, the efficiency increase would make up for that initial cost after a relatively short while, simply by extending the run-time per set of batteries. This has a both a financial benifit, and gives the bot in question more of a chance to hit something (well, at least in my experience…)
Thanks again,
Robert
Re: Efficiency
Well, the amp-hour rating that battery manufacturers give you is actually very misleading. Because of the chemistry of the batteries, you actually get less out of a battery if you draw a significant amount of current from them. (I believe one of the reasons being that the internal resistance of a battery increases) If you discharge at a current that fully discharges the battery at say…20 hours, you will get a higher amp-hour rating than you would get if you discharged it at a current that makes the battery last for say, 5 hours. For example, look at the spec sheet for this AA battery. http://data.energizer.com/PDFs/X91.pdf There’s a chart that shows you its mAh capacity as a function of the current you are drawing from the battery (discharge). According to the chart, you can get almost 3000mAh if you discharge it at 25mA, but only about 1500mAh if you discharge it at 1000mA. I do have a technical article that I can post somewhere if you’d like, but if you would like to read up on it right away, here’s a good link: http://en.wikipedia.org/wiki/Peukert_factor It talks about lead acid batteries, but all other batteries seem to exhibit this effect.
7.2v nimh 2200mah(rc car
7.2v nimh 2200mah(rc car battery) rechargeable batteries seem to do great. The meet the minimum for the 7805 and seem to run forever on a full charge. I’ve also used some 9.6v nimh radioshack specials as they are the AA size and run for a while as well, I think 1800mah…
Keeps the weight down and hours of fun!
Re: 7.2v nimh 220mah(rc car)
I’ve heard of those. Maybe I’ll give them a try. What kind of chargers do you use for those?
Re: Thanks
No problem. Yup, you’re right, I did use the break-out boards. I’m pretty comfortable soldering cheap 7805’s to pcb boards, but I began to feel uncomfortable soldering such an expensive part to a board, so I opted to dish out an extra ten bucks (in my opinion way overpriced) so that I don’t risk damaging the part while soldering.
Switchers
I’d like to try the Dimension Engineering stuff sometime, has the device been working to your expectations?
I’ve used a TI (Power Trends) switcher that I’ve like very much, a PT78T105H. It looks like it costs about the same as the DE one, but the first I’d got was a sample. Sadly it appears they don’t do that with this device anymore. I know another that has been in use by some folks I knew, the PT5101 that appears a bit dated now.
Re: Switchers
I actually haven’t run any actual efficiency tests with it. I assumed that the regulators performed according to the spec sheet. Maybe I’ll design an experiment to see if it performs as well as dimension engineering says it does.
Great info
How do you fancy posting a "Components" article on batteries? A very widely used and also widely misunderstood little article.
Re: Great Info
I by no means consider myself an expert on batteries, but I did do quite a bit of work with them a while back. Batteries are actually very interesting, and I think it would be worthwhile to share what I have learned about them. I’ll see what I can come up with.



 - I guess, if you are using Alkaline batteries, the efficiency increase would make up for that initial cost after a relatively short while, simply by extending the run-time per set of batteries. This has a both a financial benifit, and gives the bot in question more of a chance to hit something (well, at least in my experience…)
- I guess, if you are using Alkaline batteries, the efficiency increase would make up for that initial cost after a relatively short while, simply by extending the run-time per set of batteries. This has a both a financial benifit, and gives the bot in question more of a chance to hit something (well, at least in my experience…)