



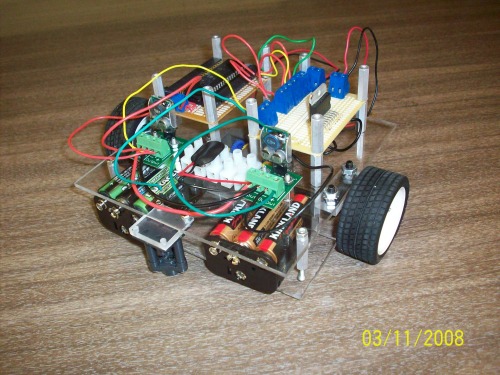
Multiple Purpose Robot
This is a robot that I am working on for my robotics class at school. At the end of the quarter, it will have to do hide and seek, tag, line following/endurance, and tug of war. Since some of these requirements conflict with each other, the trick is finding a happy balance that will win the most events. As of right now, all it does is demonstrate that it can move forwards/backwards/turn, but sensors will be added to it soon. Right now, the wiring's a little messy, but it will be cleaned up once everything is put on the robot.
11/7/08
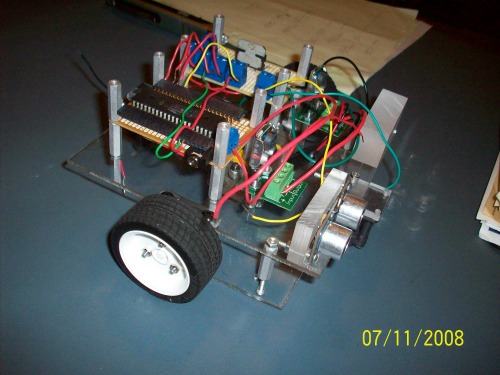
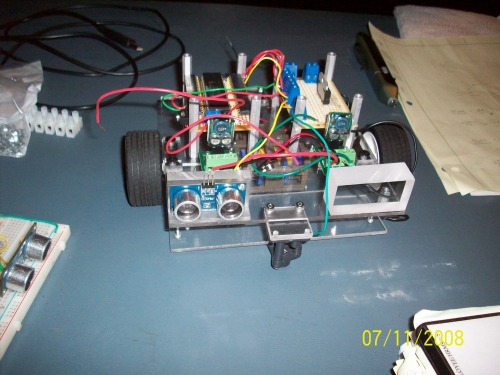
We're finally at the point where we can start putting sensors on the robot. In order to put the sonar sensor on, I had to machine some mounts for it. Here are some pictures of the first mount. The second one will be made soon.
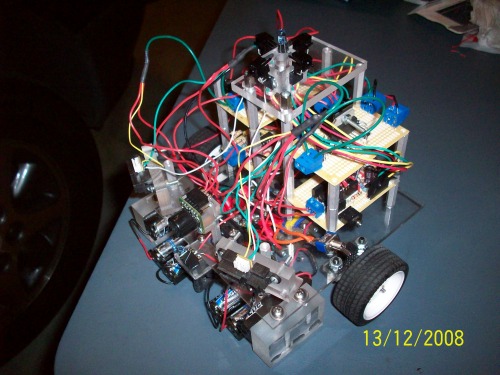
12/13/08
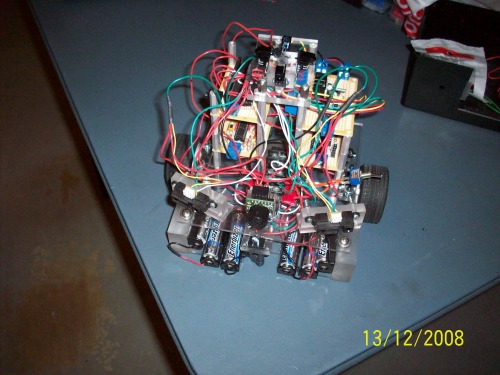
This is the "finished" robot. Most of the wiring was done the night before the competition, so it got a little messy. The final configuration uses two Sharp infrared sensors and a Maxbotix sonar sensor in the front. On the top are four infrared detectors. The other robots in the competition were supposed to emit an infrared signal so we could find them for the hide and seek and tag competitions. We got the detector module to work, but we didn't have time to make the robot smart enough to tell the difference between the infrared signal we were emitting, and the other robots. As a result, we (very successfuly) had to rely on blind luck in order to make our robot to find and tag the other robots. (Did I mention that we ended up finding every robot? Haha) The gear ratio was also changed to make it faster, and the battery packs were changed to use two sets of 4.5V battery packs. I'll upload a video of one of the competitions soon.
Obstacle avoidance, tag, hide and seek, tug of war, and line following
- Actuators / output devices: Tamiya 4-speed dual gearbox
- CPU: PICAXE 40X1
- Power source: 12X AA Batteries
- Programming language: Basic
- Target environment: Multiple environments