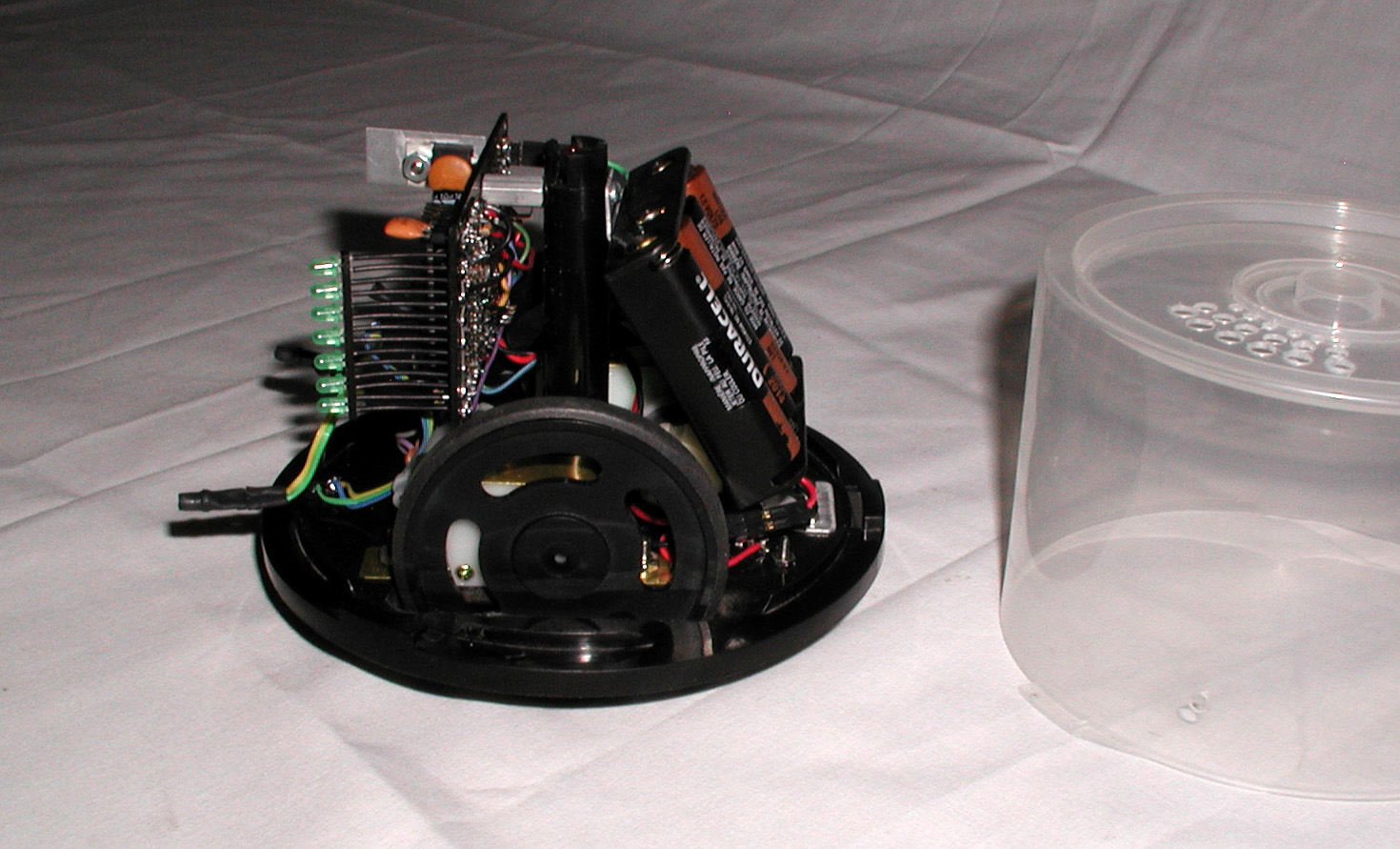
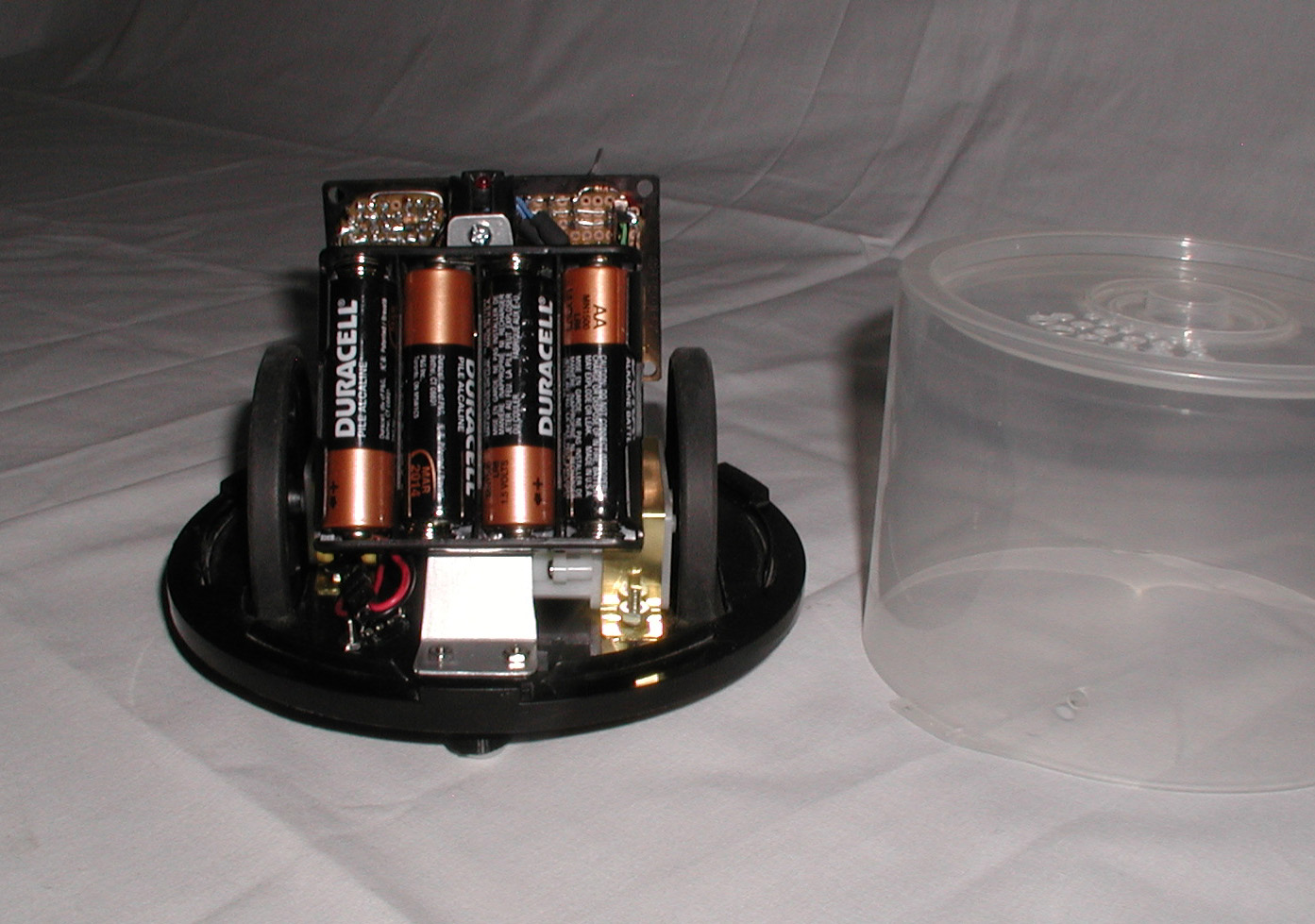
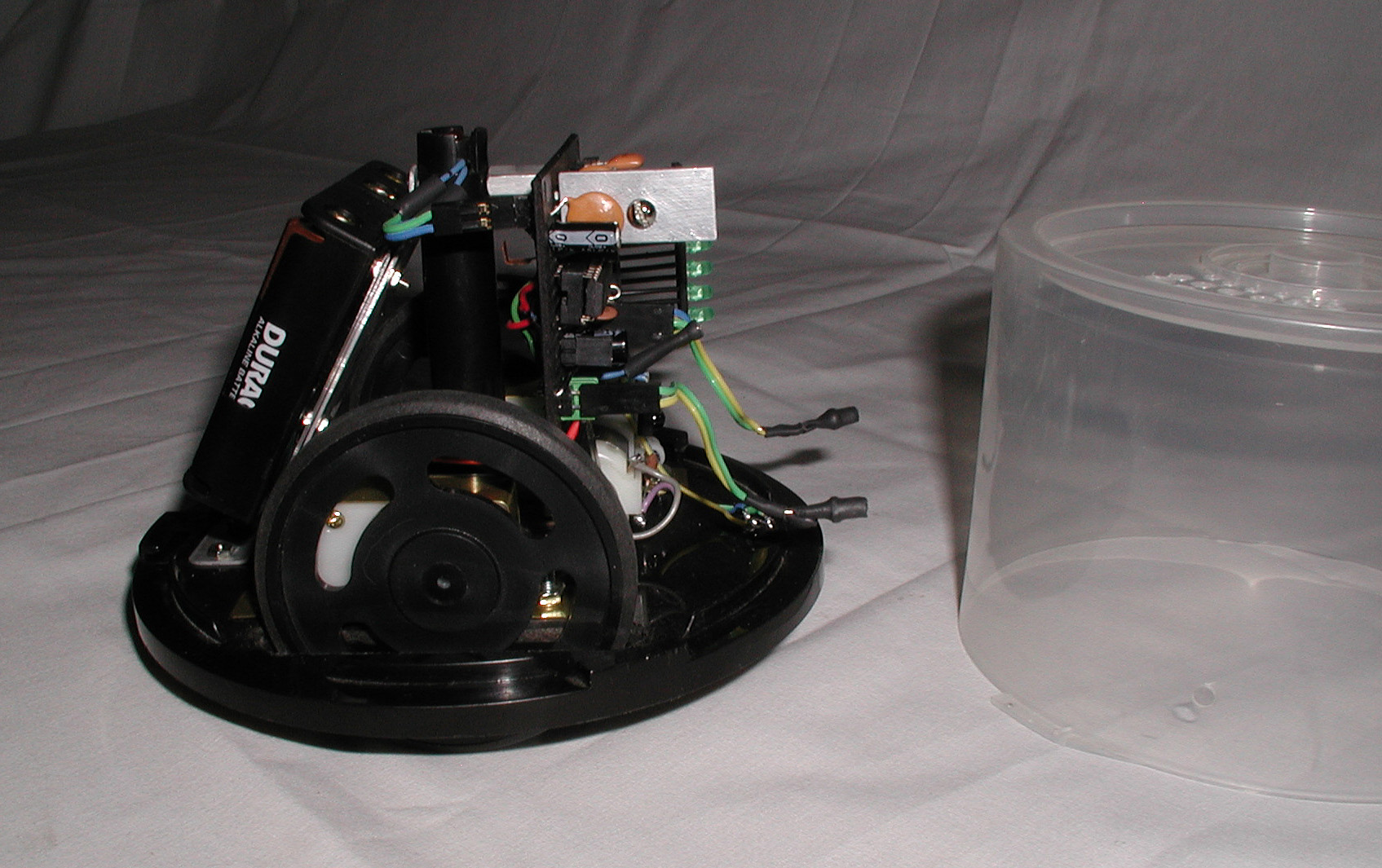
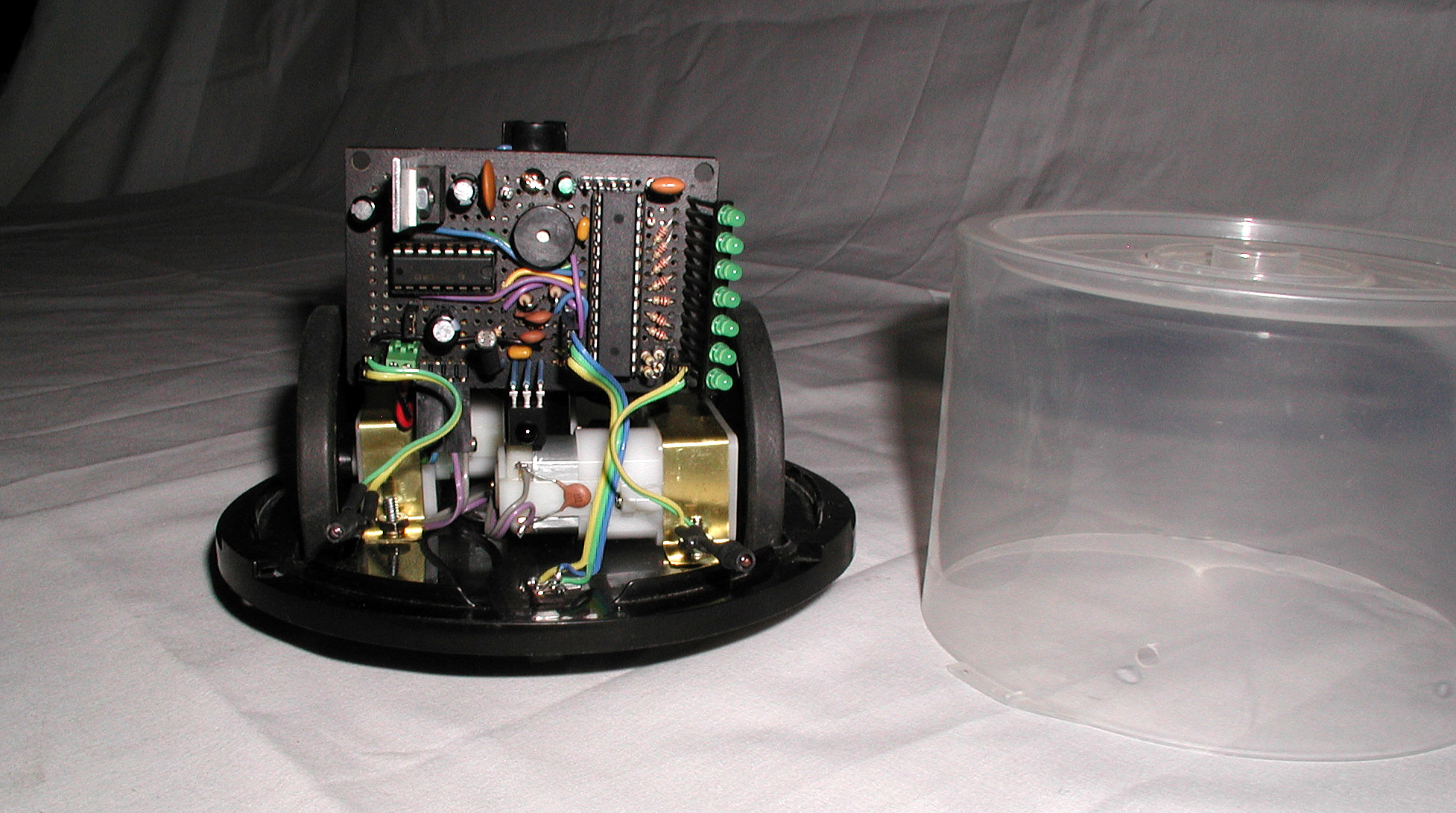
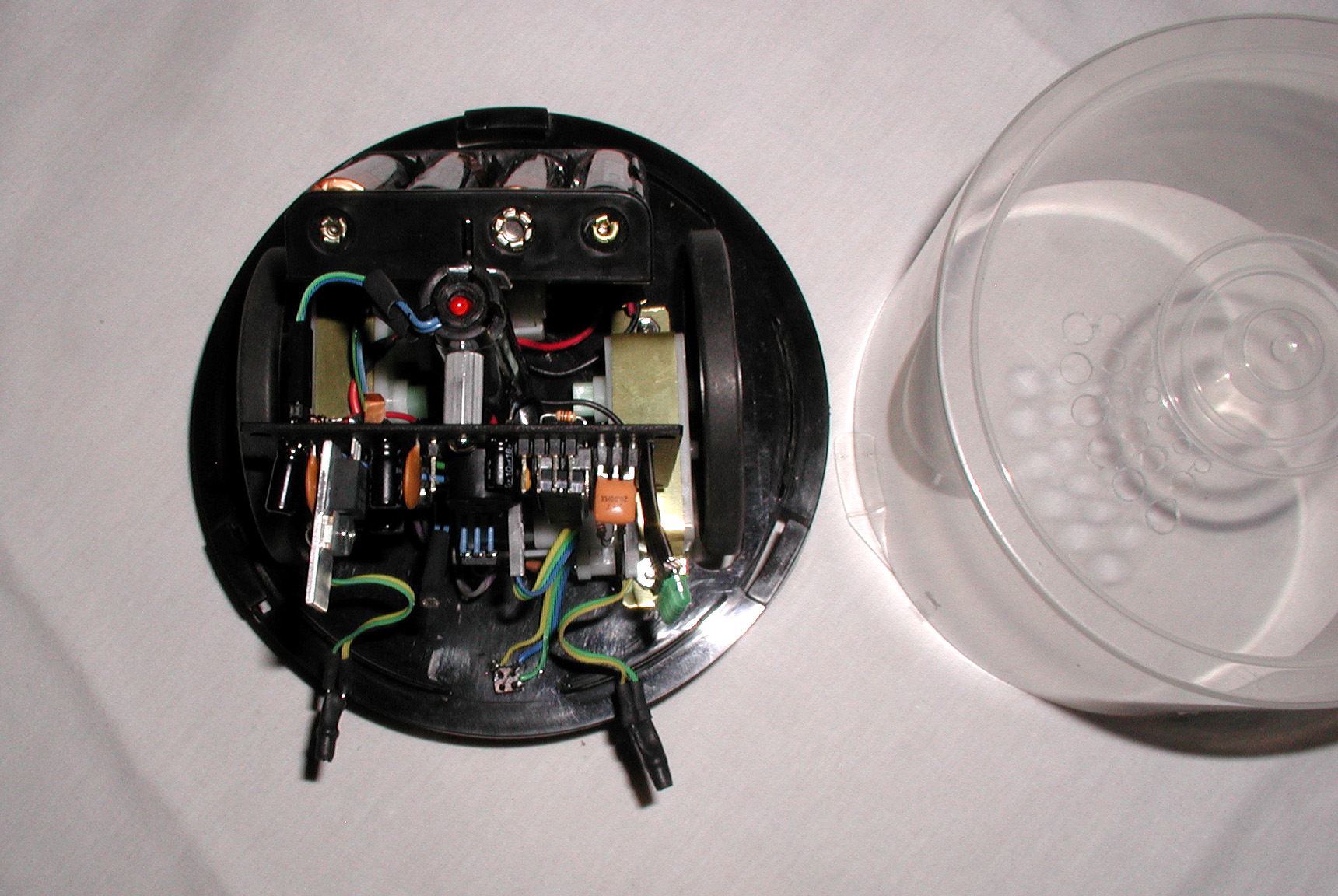
Small 'bot built into a CD case (photo with cover off). It roams around, searching for a black tape line (kinda like a line-follower). However, when it find the line it spins *very* fast and the 7 leds are used to show POV text. The black line is used as a "marker" while spinning to sync the beginning of the text line so that it doesn't drift (even as the batteries wear down). The same single line sensor is used for detecting table-top edge so it doesn't fall off.
Two IR emitters and a detector are used for basic obstacle avoidance and for inter-bot fleet communication. A CDS cell is used for setting LED brightness (or for not doing POV at all if the room is just too bright). When not doing POV, the 'bot shows nice little patterns on the row of LEDs. It looks quite cool when "under glass" with the CD case cover on.
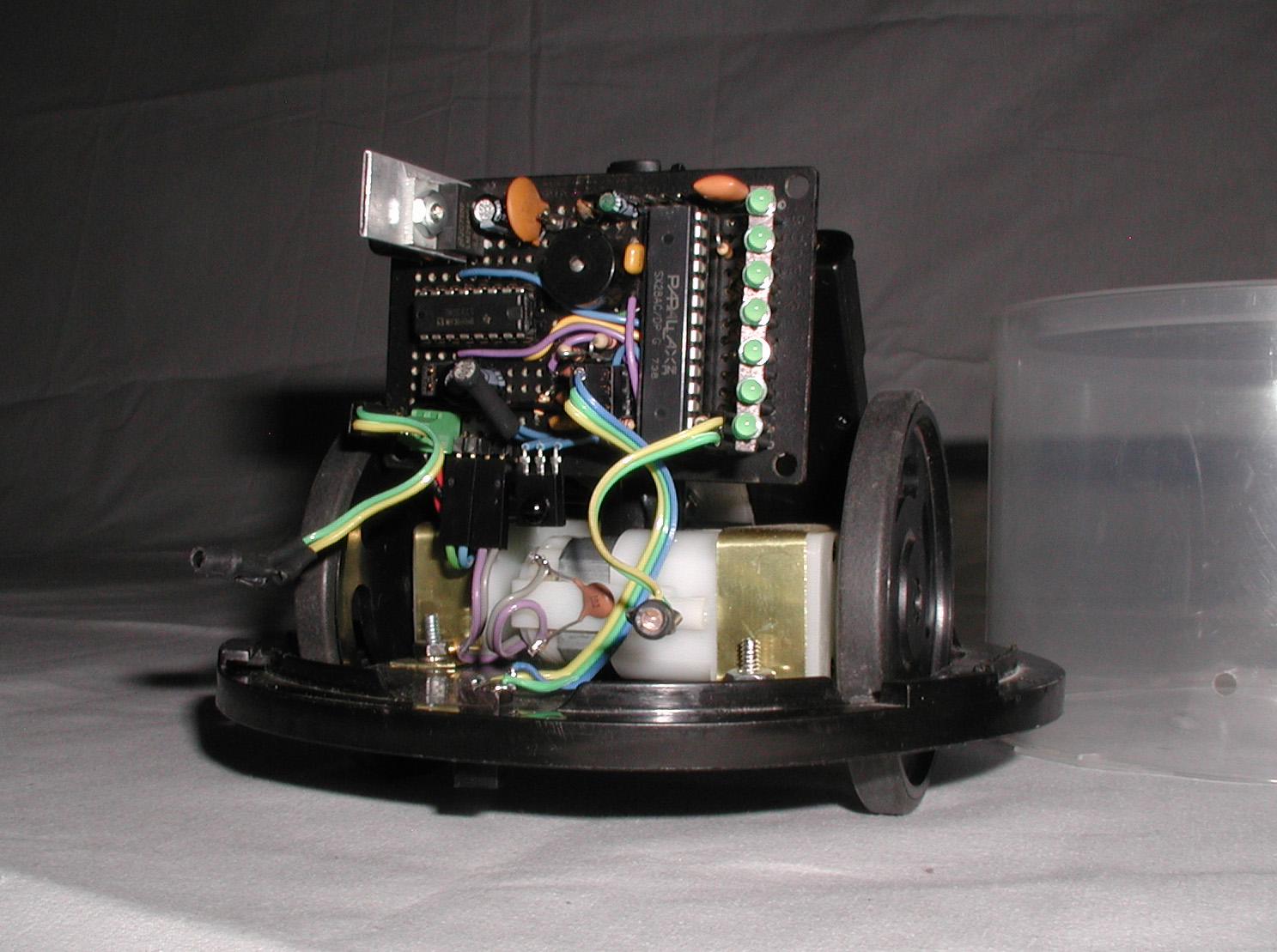
A single SX micro is used for the controller, along with an L293 dual H-bridge for the motor driver. Motors are Solarbotics GM8s but modified with the faster DC motors that Solarbotics sells to use for their GM8/2 gearboxes. The original motors in the GM8 weren't fast enough to get the persistence of vision going reliably. I should add that the faster motors are *reallllllllllllly* fast -- in the first test with the modified motors, the 'bot shot off the side of the table a full five feet into the air before falling.... it's also true what Solarbotics say -- these motors drain batteries quite quickly.
Get full source code (SX/B 2.xx beta and compiled assembly) at the link below. Note that even my SX/B code is almost all assembly anyway (most of my apps end up assembly by the end so they are compact and efficient).
I’ll get video and more pix sometime in the next few weeks. I’m pretty busy and have a dorkbot meeting coming up, so things are tight.
P.S. – I’ll be eternally grateful if someone can tell me if using Safari on these pages is a waste – it seems like nothing works quite right: text-to-links, extra image uploads, link insert thingy, etc.
Yeah, they’re painted. For some reason, I always get asked about the black boards
I use the cheapest flat black enamel spraypaint from the hardware store. On most of my projects the last few years, if the proto board will be visible when the project is finished, I paint the component side after any drilling and cutting.
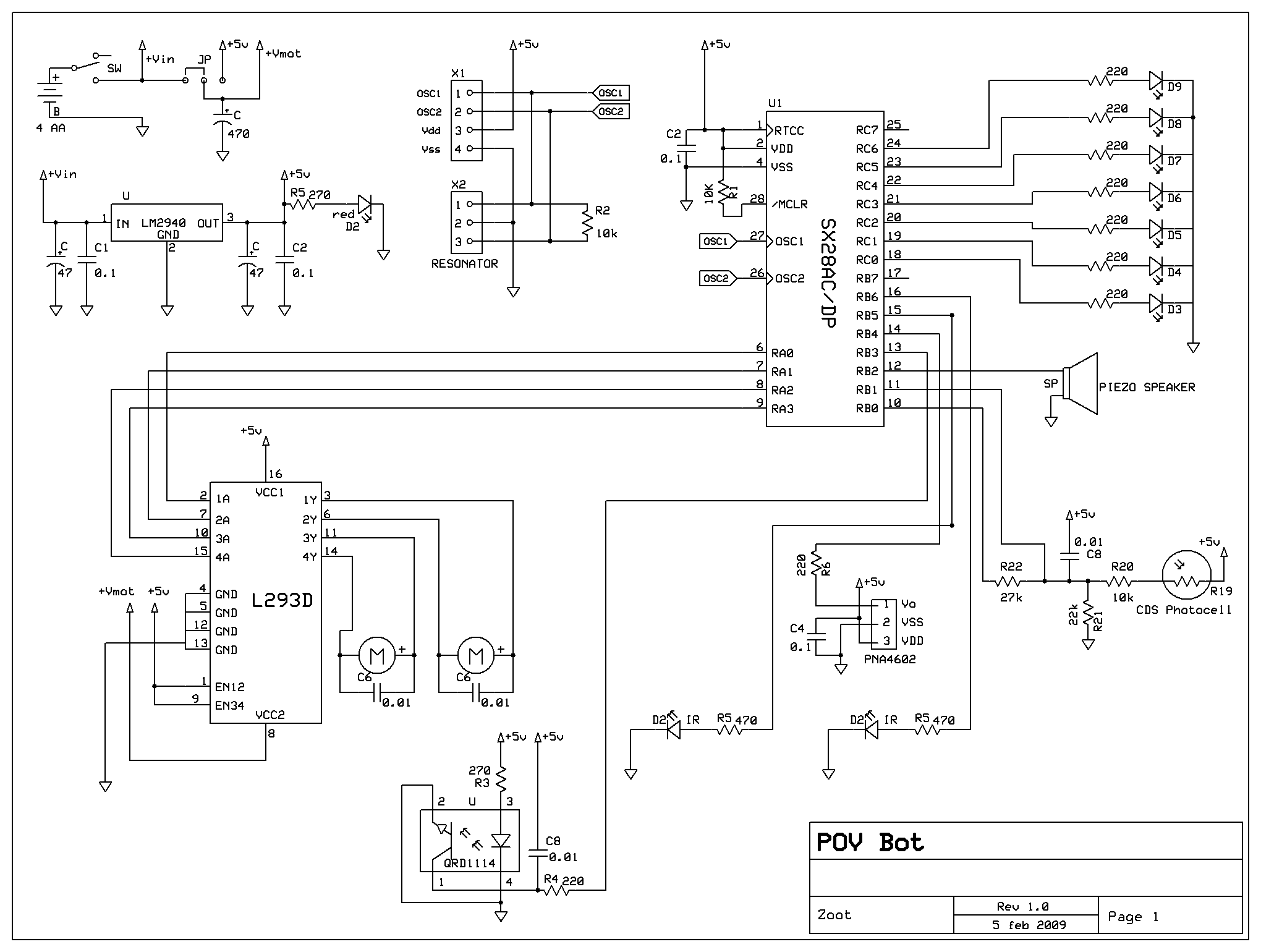
More like a line "finder" More like a line “finder” (but of course it has to avoid other 'bots that are line-followers per se). There is a large version of schem. – it’s linked to below the inserted image.
how small can you go? Someone told me to get some balls once, so I thought it would be cool to make them little pov things.
I can imagine that there’s a whole bunch of problems with putting rapidly-spinning things in balls - firstly that derned conservation of angular momentum- and I notice your setup looks like it would have a heck of a lot of it; batteries, fast spinning and what not.
So my question had to do with trying to reduce that as much as possible, since I want my balls to stay put, and not roll off into the cosmos; demouning the batteries and suchlike presents a new lot of problems, such as how to get the signal and/or power to the bits that are spinning. The whole thing is made more difficult because I want to make them as small as possible AND put a whole lot of other bits and pieces in there. One solution is to have a tri-axial gyroscope!.. which would be a very fun project, but perhaps quite a lot of overkill for what I have in mind.
Have you considered any of this? Do you even need to? My initial thoughts were to go for a small 3mm stereo jack, but there seems to be a lot of friction there - any thoughts?
emuller – not sure exactly emuller – not sure exactly what you are talking about. In the case of this 'bot, power to a rotating platform is not an issue because the entire platform itself (the 'bot) spins. Angular momentum not really an issue since it has fairly low center of gravity and is reasonably well balanced.
Right, so you answered some of my questions, but for the sake of clarity, I’ll try to describe what I mean more intelligently;
I think that for mr. spinny, angular momentum isn’t a problem because you have plenty of contact with the table - there’s a nice big fat base that can grip onto the table pretty well. If, for example, you were to put it on ice, then it would probably move around a bit, I think?
So I think that the vertical height of the CoM is not too important in reducing angular momentum, but rather the way the mass is distributed about the rotation axis, and the speed that it rotates. Perhaps though, the height of the CoM would have ramifications for its stability, were it not as well balanced about the rotation axis as it is.
In any case, my other question was to try to see what thoughts you might have about a different arrangment (not for mr. spinny so much, but for spinning things in general) for making a pov thingy. My concept is to put a pov thingy in a ball, which does not have a nice broad base to stop the bot from spinning around, and angular momentum is an issue. The less spinning mass, the better, so I was trying to find ways to supply say, power, gnd and signal only to the spinning bit, and leave the rest of it stationary. Since you have created a spinning thing, I was wondering what other alternatives you might have considered while designing it.
I hope you do not mind the fact that I am jumping right in your conversation here, but I might have some thoughts on putting a spinning platform in a ball and still keep it fairly motionless.
Now, I do not know this from my own experience and as a matter of fact, I do not even know if this idea is any good but what if you put a circular platform through the centerpoint inside a ball. Through the center of the circular platform, you put a thin tube which holds the platform in the center of the ball (I am on vacation now and do not have a decent computer right now but when I am back home I will try to make a drawing of it using some CAD-software.). Then, you fit wheels on the circular plaftorm (preferably 3 or more, to make sure forces are distributed well) which make contact with the inner surface off the ball. It is imperative that these wheels are in the center of the ball (or that there are more of them evenly spread across the inner surface)! These wheels are then connected to a (set of) motor(s) so that they can rotate the platform by rotating against the inner surface. If you then make sure the friction of the thin tube (wich is holding the platform in center) rubbing against the inside of the ball is lower than to ball rubbing against the surface it is lying on (by using oil or grease, for example), the platform will rotate inside the ball instead of the ball itself rotating around the platform. If you then make sure one of the sides of the platform is heavier than the other (for example: place batteries on one side, electronics on the other) the platform will stay level to the earth (on the condition that all of the weight is spread evenly around the spinning axis (thin tube)).
I do not know if this idea is any good, but this is just a quick thought I got whilst reading your question




 please upload larger image
please upload larger image