



Mr. Spinny (with new pix)
A persistence-of-vision robot.
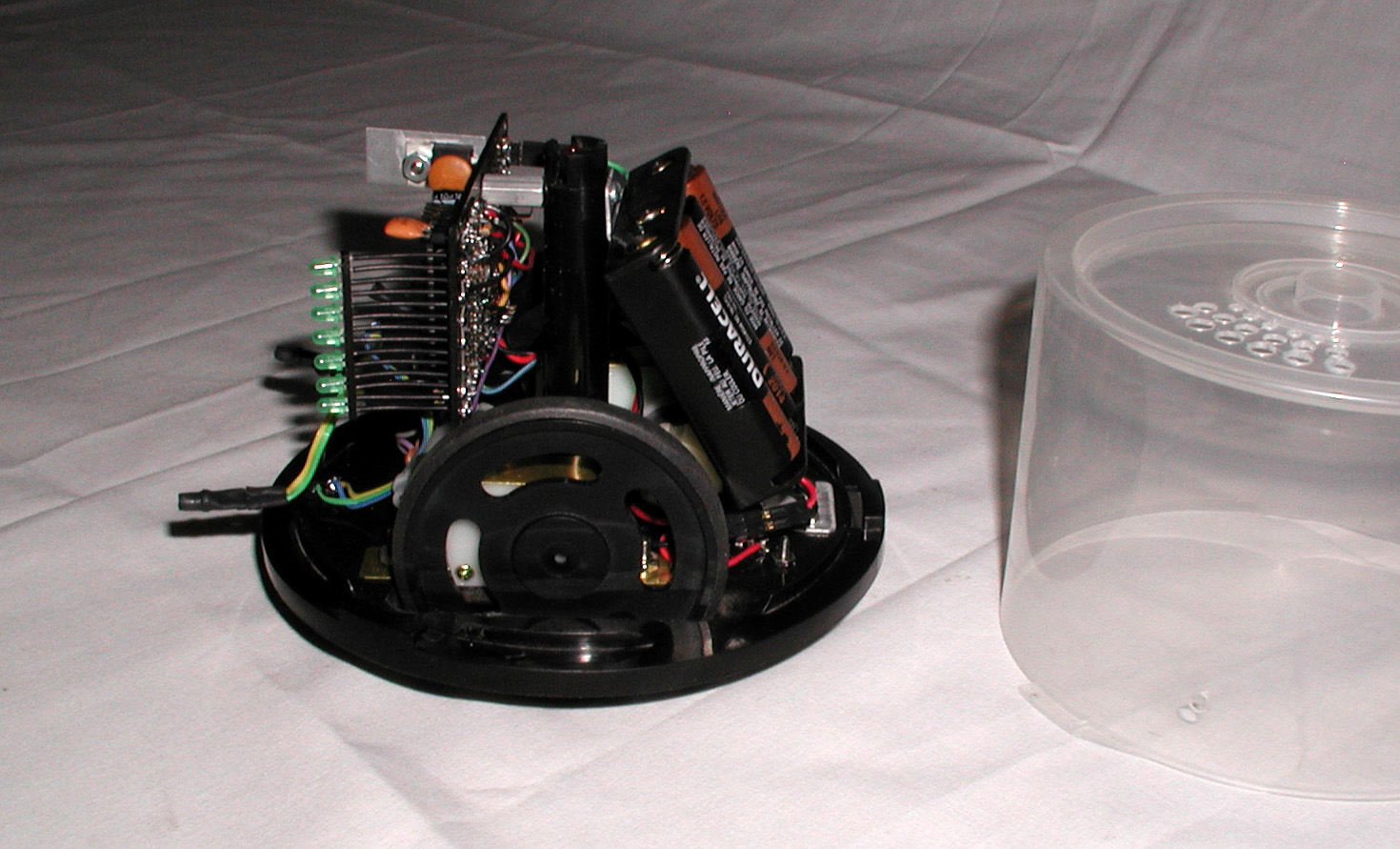
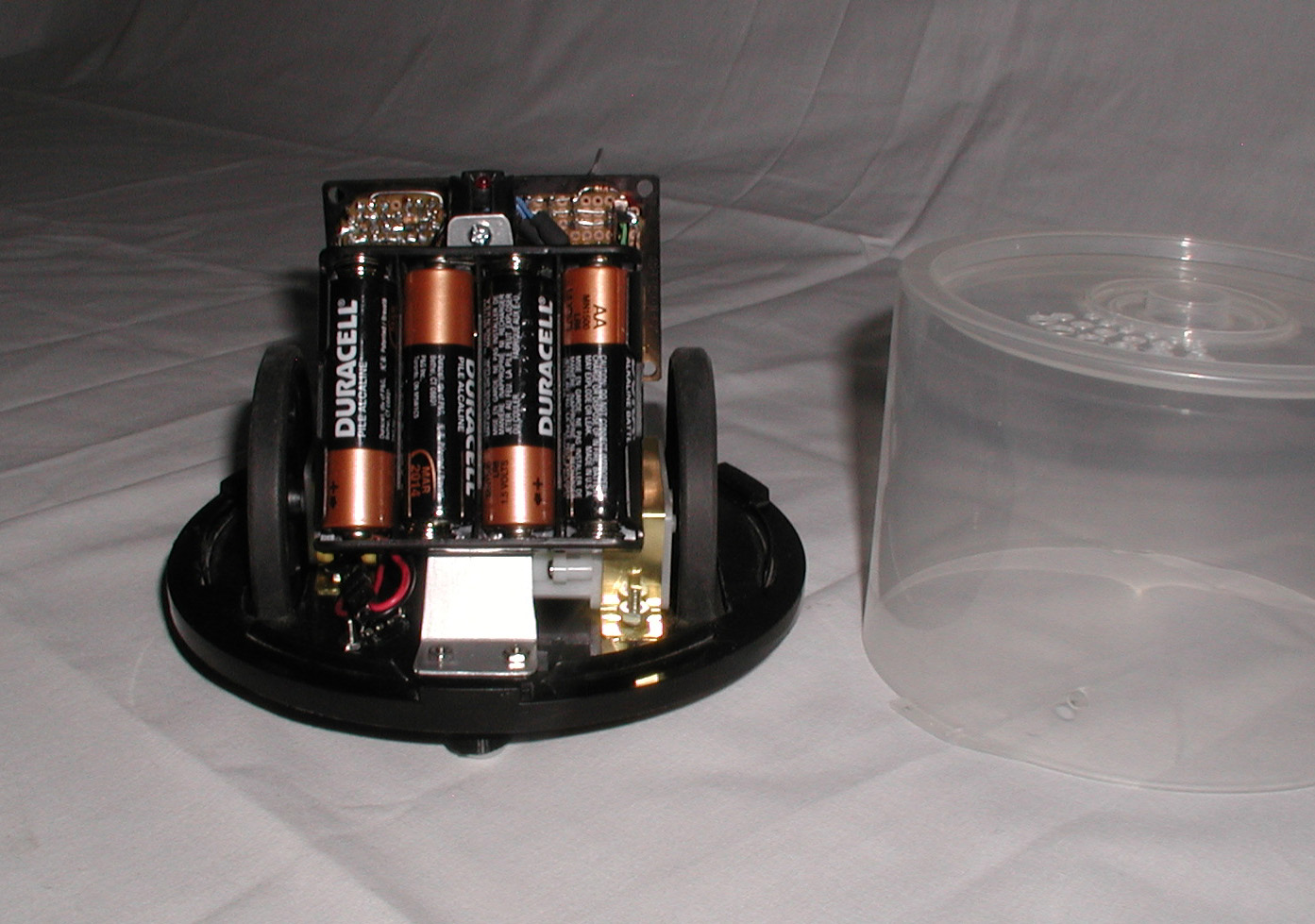
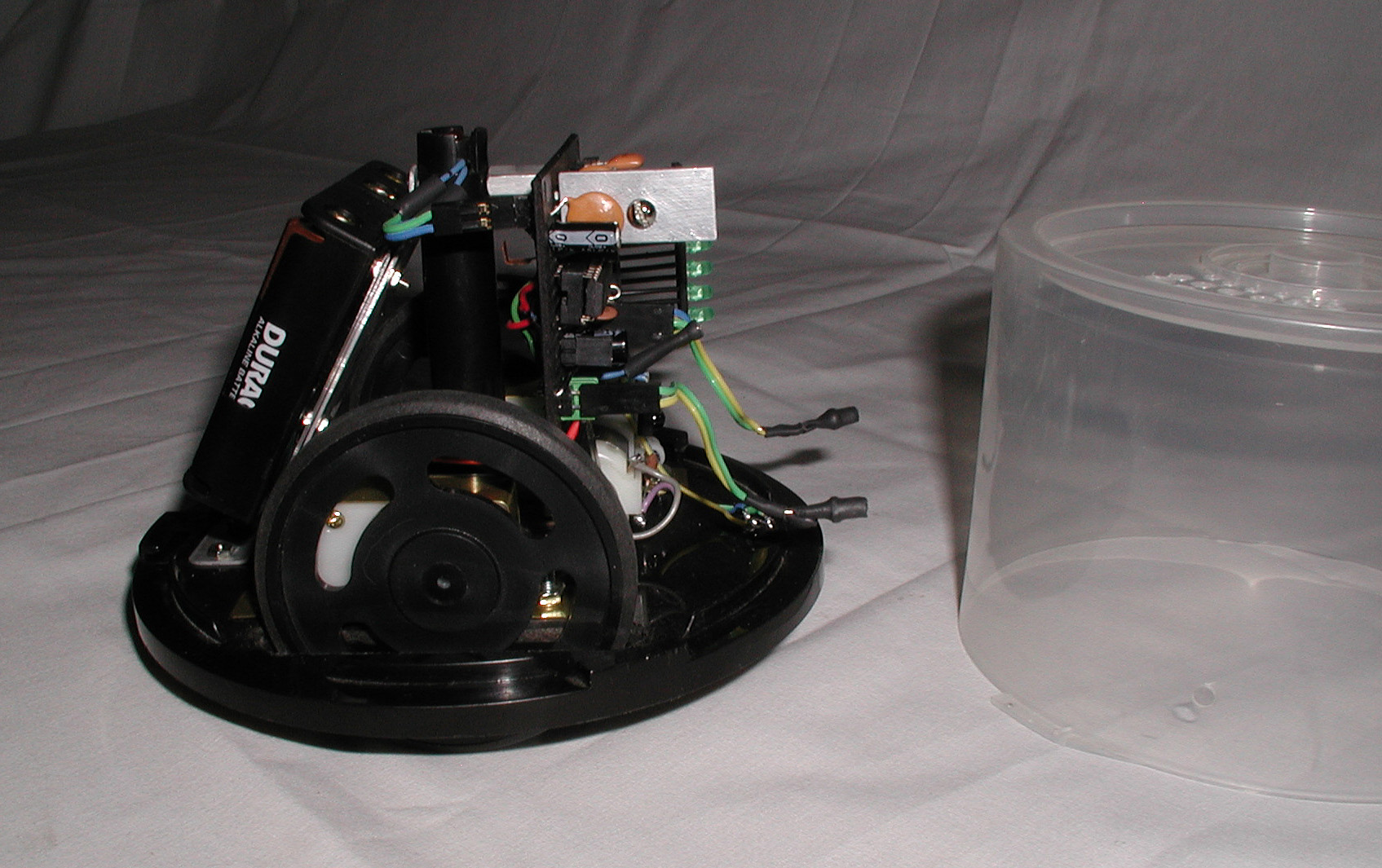
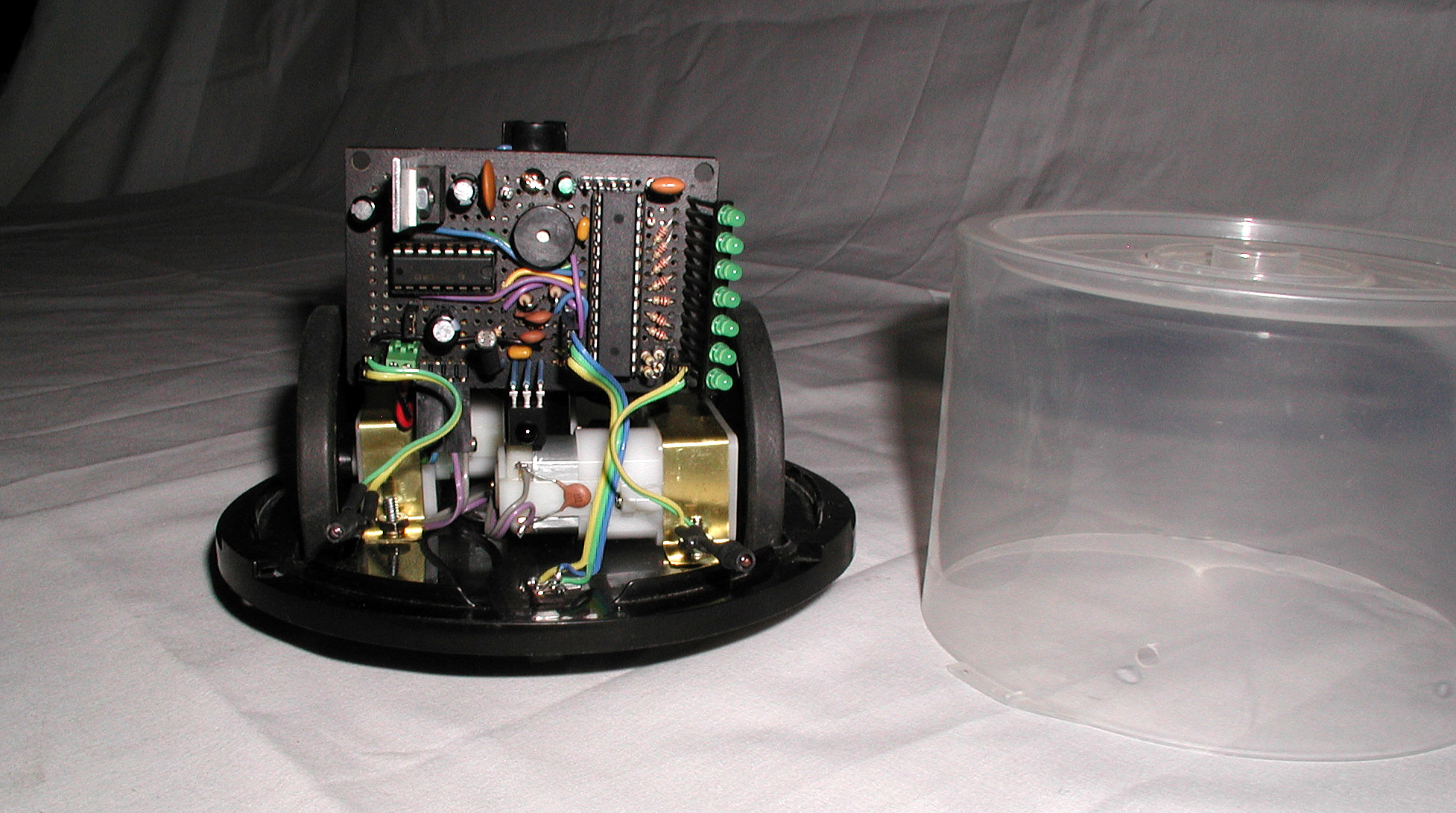
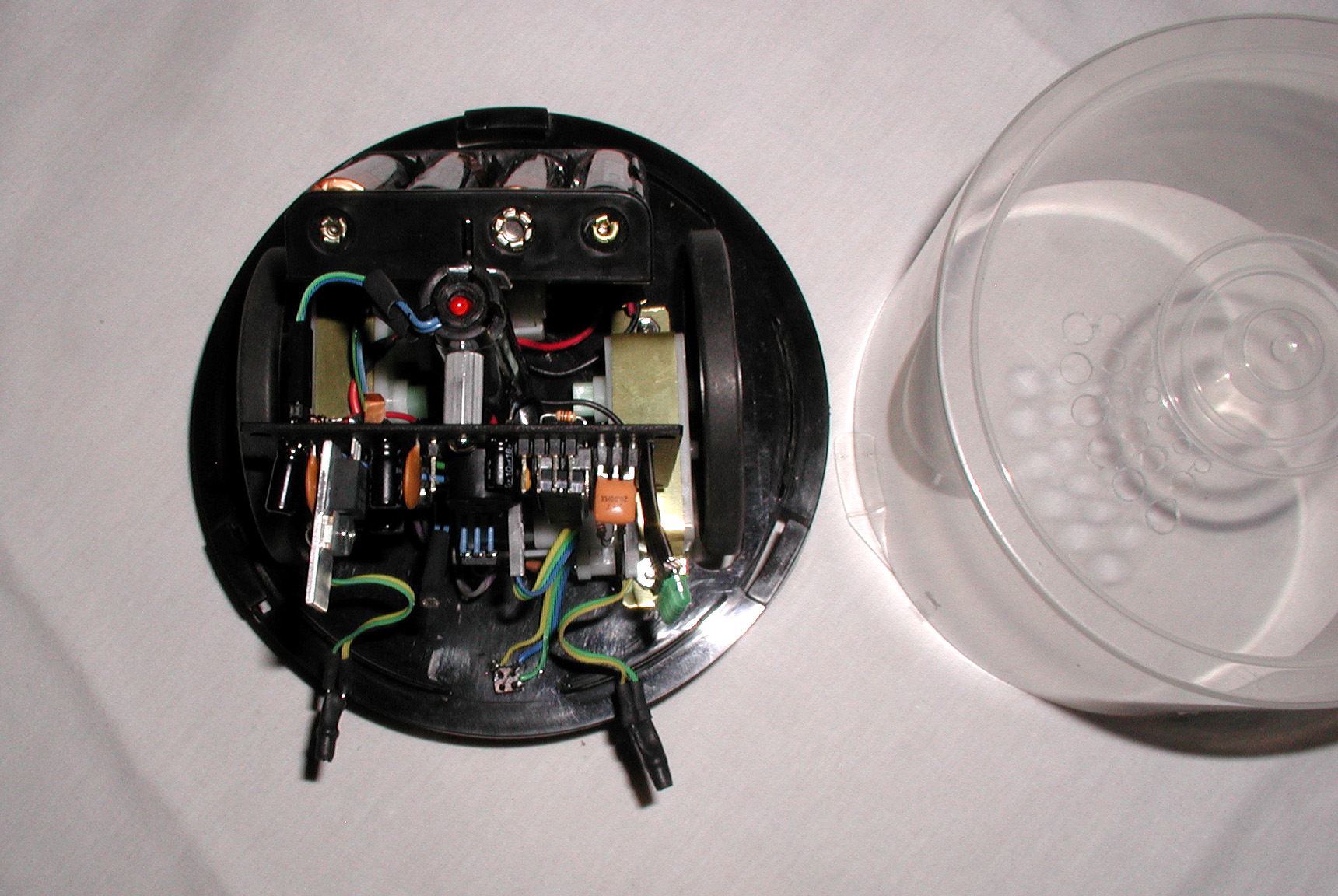
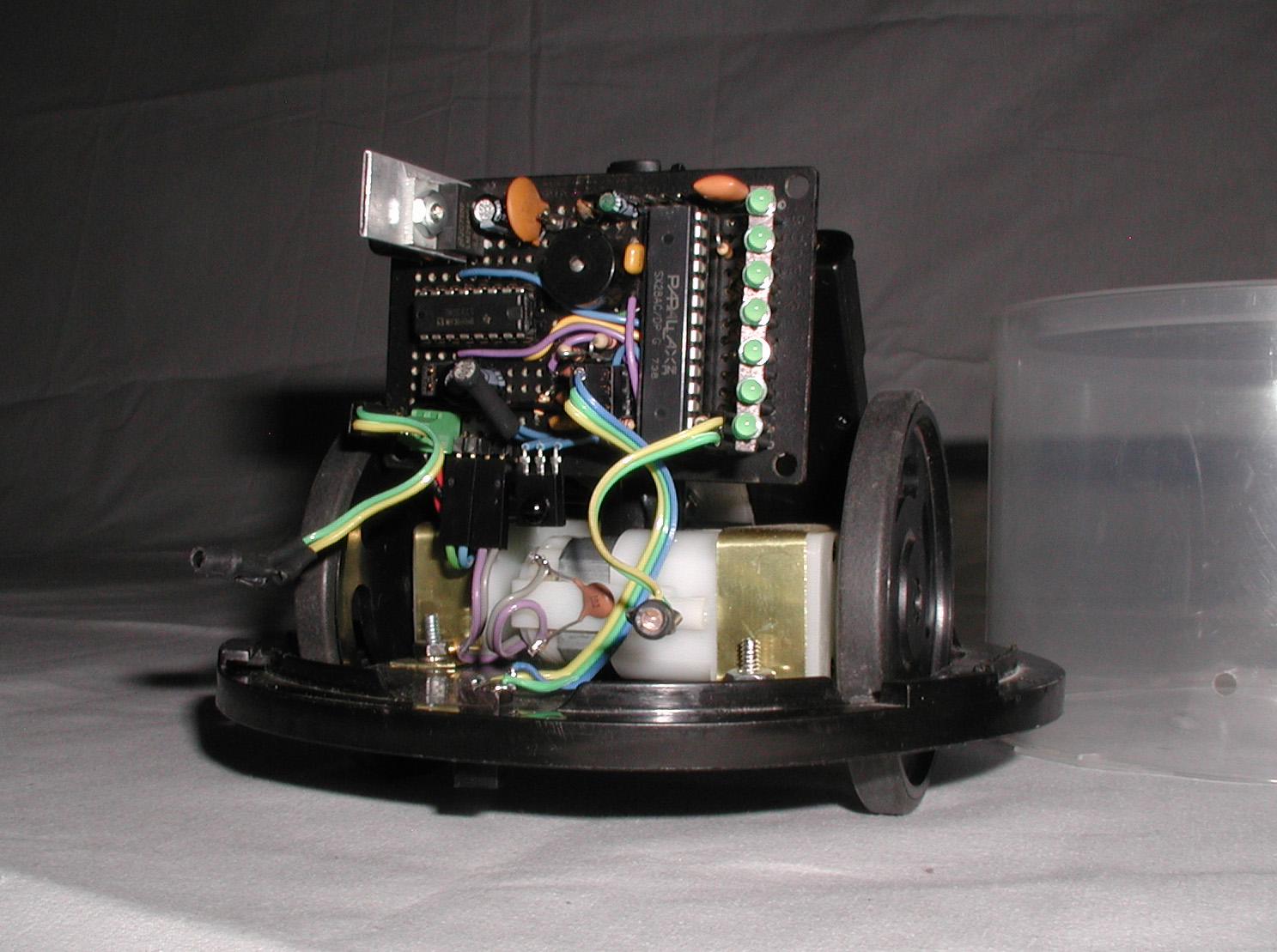
Small 'bot built into a CD case (photo with cover off). It roams around, searching for a black tape line (kinda like a line-follower). However, when it find the line it spins *very* fast and the 7 leds are used to show POV text. The black line is used as a "marker" while spinning to sync the beginning of the text line so that it doesn't drift (even as the batteries wear down). The same single line sensor is used for detecting table-top edge so it doesn't fall off.
Two IR emitters and a detector are used for basic obstacle avoidance and for inter-bot fleet communication. A CDS cell is used for setting LED brightness (or for not doing POV at all if the room is just too bright). When not doing POV, the 'bot shows nice little patterns on the row of LEDs. It looks quite cool when "under glass" with the CD case cover on.
A single SX micro is used for the controller, along with an L293 dual H-bridge for the motor driver. Motors are Solarbotics GM8s but modified with the faster DC motors that Solarbotics sells to use for their GM8/2 gearboxes. The original motors in the GM8 weren't fast enough to get the persistence of vision going reliably. I should add that the faster motors are *reallllllllllllly* fast -- in the first test with the modified motors, the 'bot shot off the side of the table a full five feet into the air before falling.... it's also true what Solarbotics say -- these motors drain batteries quite quickly.

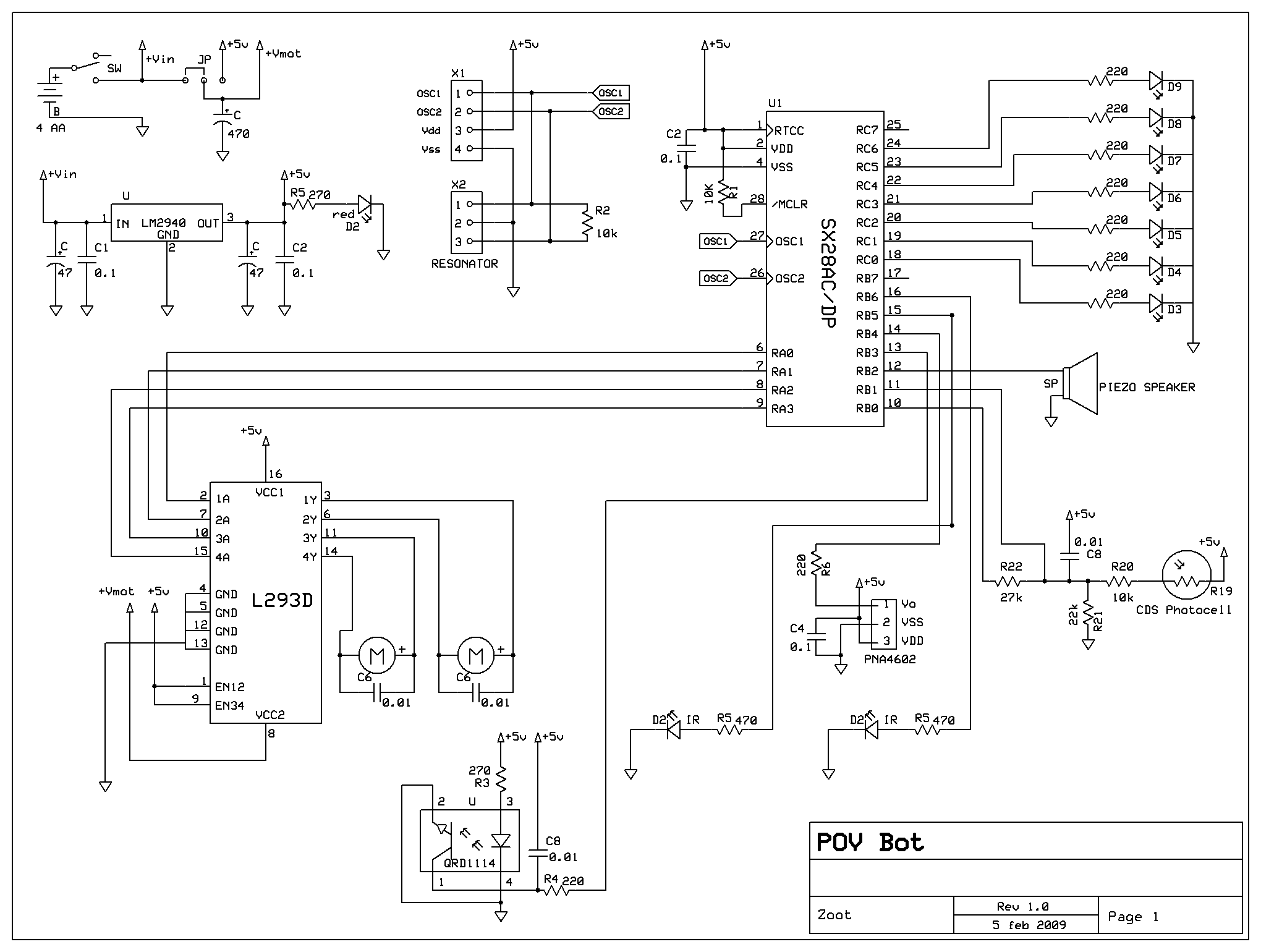
Here's the schematic...
Lastly, a full-size PDF that may be used for mechanical/drilling template is here:
Get full source code (SX/B 2.xx beta and compiled assembly) at the link below. Note that even my SX/B code is almost all assembly anyway (most of my apps end up assembly by the end so they are compact and efficient).
persistence of vision
- Actuators / output devices: LEDs, 6v gearmotors
- Control method: autonomous
- CPU: SX28
- Operating system: embedded app
- Power source: 4AA
- Programming language: Assembly, some SX/B
- Sensors / input devices: ir detector/emitter pair, cds cell, line sensor (QRD)
- Target environment: indoor