Meet Mr. Lobster. He's big, ugly and lazy - but he's also environmentally conscientious. Now in full-colour video!Wow!
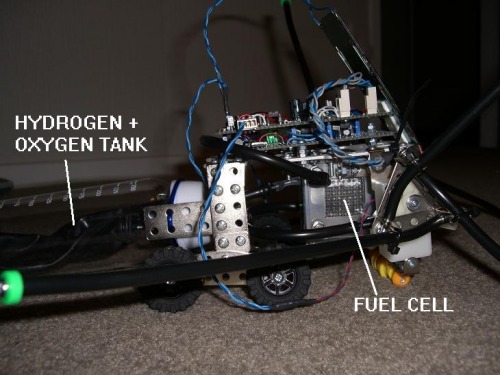
The small photovoltaic array on his head powers a 600mW double PEM (proton exchange membrane) fuel cell, causing the fuel cell to split stored water in hydrogen and oxygen gas. The gases are stored in 'helium grade' balloons inside the tank that makes up Mr. Lobster's 'abdoben'. The fuel cell then consumes to stored gases and converts them back into water, producing around 2V @ 500mA which is boosted by an on-board voltage converter. The voltage converter charges a 1F super-capacitor, which is used to power the two microcontrollers and motors.
As for behaviour, Mr. Lobster just wants to spend all day frolicking in the sun. If he's not yet fully charged and there's ample sunlight he'll just laze about, but if he's 'full' he'll wander about aimlessly. If there's a sunnier patch nearby he'll move towards it, otherwise if it's dark he'll shut off as much hardware as possible to conserve energy - the voltage boost converter goes into a low-power state, and one of the two PIC16LF628A microcontrollers is turned off. The 'master' PIC handles decision making, reading of LDR couples and boost converter management. The 'slave' PIC monitors the stored power level and controls the motors using quantised charge feedback. The PICs communicate via two-way asynchronous USART (like typical serial comms, but without a clock).
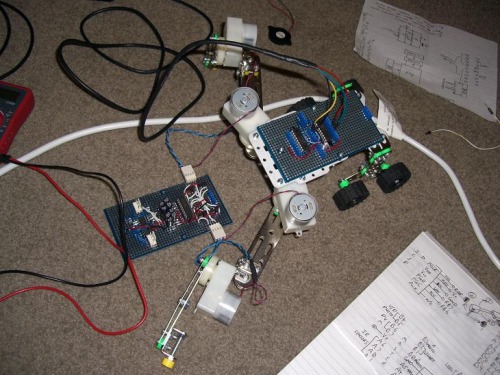
Up until yesterday Mr. Lobster looked like this:
So as you can see he's changed quite a lot in the last 24 hours =D Sadly one of the feedback circuits for his forearm motors went ballistic and there was no time to track down and correct the problem. I tried to manually control the walking gait, but without feedback Mr. Lobster was so inept that he couldn't walk at all. The whegs (wheel-legs) were actually part of the original concept, so I quickly added those back in. They're simply made of thick-walled rubber gardening hose with a curtain-wire spring fitted tightly inside. They're not terribly effective on smooth carpet, but Mr. Lobster is surprisingly agile over grass or rubble.
As requested I've written a bit of a walkthrough on using PEM Fuel Cells which you can check out here.
Actuators / output devices: 2 x GM17
Control method: Full autonomous
CPU: 2 x 16LF628A
Power source: 3 x SZGD5433 PV Cells, 600mW PEM Fuel Cell
Programming language: Assembly
Sensors / input devices: 2 x LDR couples, Motor feedback
You say that motor feedback is one of the sensor/input systems - which parameters are you querying, what kind of condiitons influence a modification to behaviour?
hmm, what does "quantised charge feedback" entail? … heck, what does it even mean?
Is there a lot of metal weight onboard - or is it all aluminium? Where did you get it from?
Originally built for collision detection for the 2DoF front legs, the feedback system works at the end of every programmed movement. The H-bridges that drive the motors have Darlington Pair NPNs on the low side (which also control the high side PNPs), which have a small capacitor placed between the base terminal and ground. When the microcontroller wants to stop the motor it switches the output pin that controls the H-bridge to a high-impedance input. The small base capacitor keeps the H-bridge running for about 10 milliseconds, but this time varies depending on how much current the motor is drawing - more motor current causes more base current to be pulled from the capacitor, so it discharges quicker. Meanwhile, the microcontroller has started an internal timer that advances every microsecond, and the instant that base capacitor runs out it records the elapsed time. The quanta of charge the motor is given during the feedback process is always the same, so the time taken to discharge the base capacitor provides a convenient way to examine how much current the motor was drawing just before it was turned off. Since the motor was already running before the feedback routine started, the usual problem of high starting current throwing off the readings is avoided.
The readings for discharge time are compared to a simple threshold value which indicates whether or not the motor has stalled (or close to it) or is still running happily. With the original legs stalling was good, since it meant the leg had made firm contact with the ground. On the whegs however, stalling out means the wheg is stuck, so Mr. Lobster tries to free himself by reversing the motor and seeing if it can rotate it in that direction. If he can’t rotate the motor either way Mr. Lobster gives up for a while, and tries again later.
Apart from the main plate and other gear from the Mr. Basic set, the rest of the metal is from some $2 Meccano-style toy sets I bought in bulk a few months ago. It’s pretty flimsy stuff, but because it’s so thin it isn’t too heavy and it’s easy to reshape if needed.
I think I don’t have a clear picture of the timing circuit; the microcontroller is driving the Hbridge. To turn off the motors, it toggles the enable pin via a NPN, to switch to a hi-impedance output? The capacitor is connected in parallel to the base of the NPN, and goes to ground.?
Sorry, I’m not too sharp with nomenclature - if you have the patience, perhaps a quick sketch would help?
I tried a few different configurations, but this simple one was the most effective. Cb is about 1uF for a ‘cooldown’ time of ~10ms. The darlington transistors are ULN2803A, so there are a few resistors and diodes that I’ve left off the sketch.
The microcontroller pins themselves are set to input/high-Z, not the bridge itself, it keeps running.
I’m a mechatronics engineer by profession, which means I’ve picked up a fair amount of chemistry-based knowledge through studying the properties of different materials. Plus with all the recent advances in MEMS, quantum and nanotechnology, I feel that a good understanding of at least the fundamentals of chemistry is important.
As far as coming up with the idea, I’ve been interested in alternative power for mobile devices (mostly autonomous robotics) for ages now - I like my critters to be able to look after themselves =) I knew a guy working at my local JayCar, so I was able to pick up the double layer fuel cell for quite a good price a few months ago. Apart from basic testing (charging up to power motors, etc) I hadn’t really made use of it because the voltage output is so low, so I figured it was about time I did something about that… Originally I was going to use small plastic bottles to store the hydrogen and oxygen, but the more you pump into the bottle the higher the pressure gets, so it becomes hard for the fuel cell to generate more gas (i.e. the charging capacity becomes quite limited). On the other hand, flexible containers like the balloons are able to store much more gas at lower pressures, but they’re prone to scrapes and punctures… After a bit of puzzling I came up with the idea of combining the two and sticking the balloons inside a plastic bottle =D Not exactly a genius idea, but the simple ones are the ones that work!
Wow. Cool video. Are you getting the effect you want with his locomotion? It looks like a more grippy surface on his… uh, his… uh, his whateveryoucallems might move him along more effectively. Or maybe do something to stiffen the whateveryoucallems.
Anyway, very cool style of motion and power. Your cat seems well pleased too.
…a mechatronics engineer. I myself have been working as a selftaught programmer for years. I recently started studying IT enginnering. I thought very long and hard about choosing mechatronics engineering instead, but in the end decided to go for IT. The thing is my main interest is AI and if I’m to make any contribution to robotics some day it will be in the creation of robot brains rather then their bodies.
However I’m still considering whether I should have chosen mechatronics instead
My university only had about 40 places for the mechatronics specialisation, since they’d only started it 2 years beforehand, so naturally I put mechatronics first on my list of choices. If it was the hardest to get into, it must have been the best right?
To be honest I don’t think it’d take much work to learn any of the topics you’re not covering, and in any case technology is moving so fast that by the time you learn something it’s already out of date =) University is more about learning how to learn than simply teaching you what to do. Your software/programming knowledge will no doubt help you learn other things more quickly, in the same way that my hardware/control background helped me learn about programming.
Although I’m pretty sure you can get them cheaper, especially since you’re living in the US. What I really want is a DEFC (Direct Ethanol Fuel Cell), those thing have a sweet power density factor.
Thanks for all the kind words and interest guys, there have been a few tough patches as with any project, but on the whole Mr. Lobster was a lot of fun. If there’s anything else you’d like to know about Mr. Lobster, don’t hesitate to ask.