


Mr. Lobster
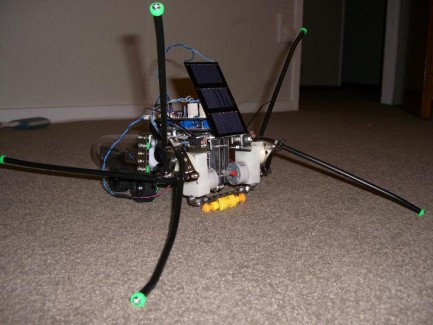
Meet Mr. Lobster.
He's big, ugly and lazy - but he's also environmentally conscientious.
Now in full-colour video! Wow!

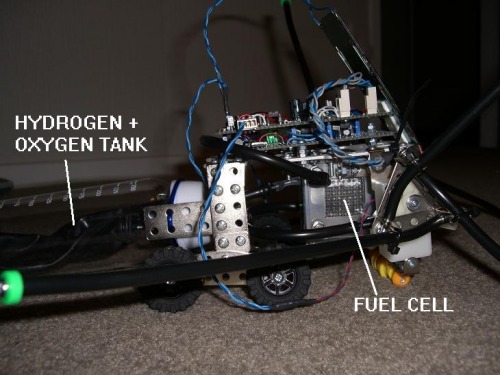
The small photovoltaic array on his head powers a 600mW double PEM (proton exchange membrane) fuel cell, causing the fuel cell to split stored water in hydrogen and oxygen gas. The gases are stored in 'helium grade' balloons inside the tank that makes up Mr. Lobster's 'abdoben'.
The fuel cell then consumes to stored gases and converts them back into water, producing around 2V @ 500mA which is boosted by an on-board voltage converter. The voltage converter charges a 1F super-capacitor, which is used to power the two microcontrollers and motors.
As for behaviour, Mr. Lobster just wants to spend all day frolicking in the sun. If he's not yet fully charged and there's ample sunlight he'll just laze about, but if he's 'full' he'll wander about aimlessly. If there's a sunnier patch nearby he'll move towards it, otherwise if it's dark he'll shut off as much hardware as possible to conserve energy - the voltage boost converter goes into a low-power state, and one of the two PIC16LF628A microcontrollers is turned off.
The 'master' PIC handles decision making, reading of LDR couples and boost converter management. The 'slave' PIC monitors the stored power level and controls the motors using quantised charge feedback. The PICs communicate via two-way asynchronous USART (like typical serial comms, but without a clock).
Up until yesterday Mr. Lobster looked like this: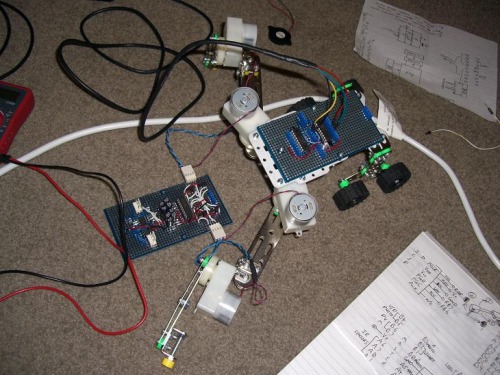

So as you can see he's changed quite a lot in the last 24 hours =D
Sadly one of the feedback circuits for his forearm motors went ballistic and there was no time to track down and correct the problem. I tried to manually control the walking gait, but without feedback Mr. Lobster was so inept that he couldn't walk at all.
The whegs (wheel-legs) were actually part of the original concept, so I quickly added those back in. They're simply made of thick-walled rubber gardening hose with a curtain-wire spring fitted tightly inside. They're not terribly effective on smooth carpet, but Mr. Lobster is surprisingly agile over grass or rubble.
As requested I've written a bit of a walkthrough on using PEM Fuel Cells which you can check out here.
- Actuators / output devices: 2 x GM17
- Control method: Full autonomous
- CPU: 2 x 16LF628A
- Power source: 3 x SZGD5433 PV Cells, 600mW PEM Fuel Cell
- Programming language: Assembly
- Sensors / input devices: 2 x LDR couples, Motor feedback
- Target environment: Rolling grassy plains