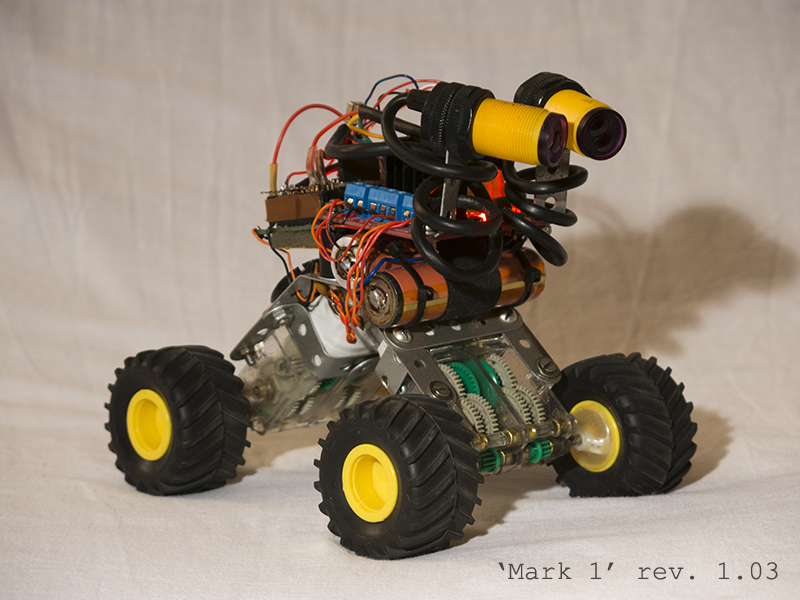
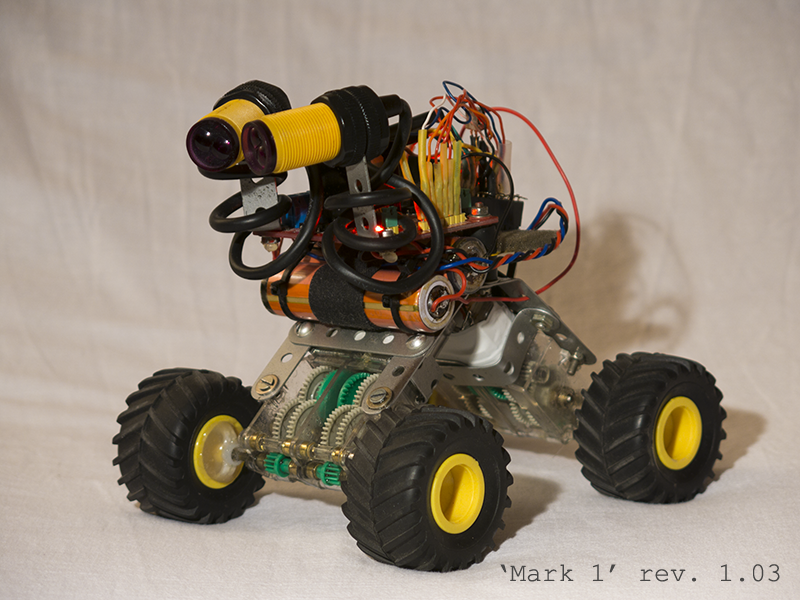
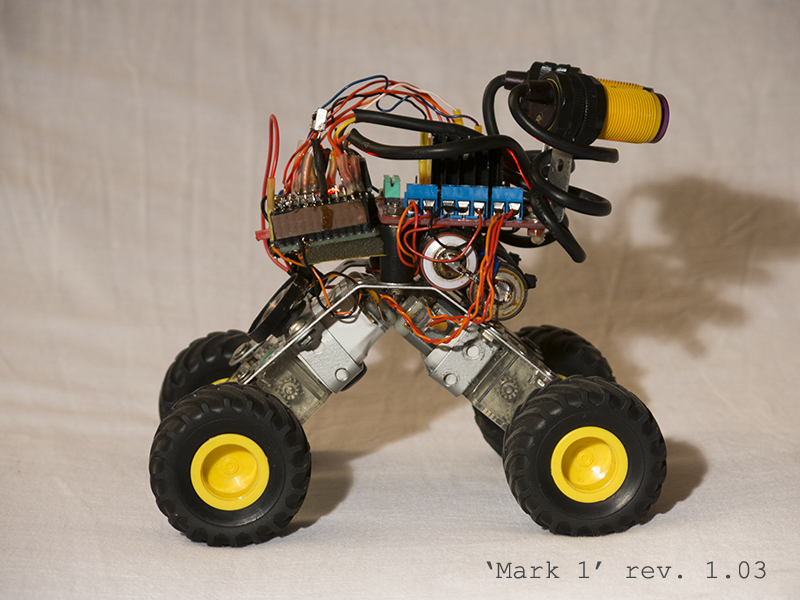
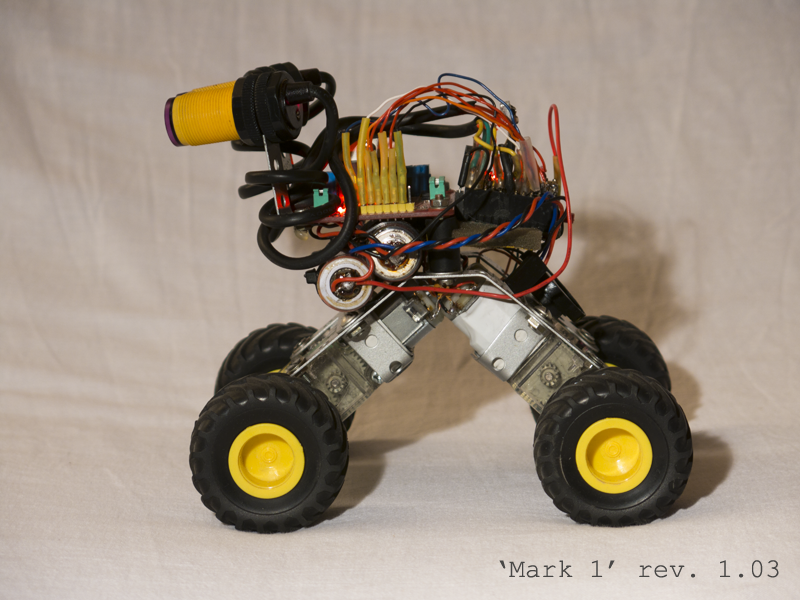
This is my first very simple robot that reads information from two IR sensors and makes decision about moving to work around barriers. The main aim was to make him as powerful as possible so 4 DC motors with two Tamiya 70168 double gearboxes was used in construction to implement 4x4 formula. Also manual controlling is possible using IR remote control from my old Pioneer CD-player.
Love the elegance in its simplicity / minimalist design. Your parts list is complete to the point where any user can follow them and build their own. Appreciated.
Great job on the bot. After seeing you throw slippers at it someone should call the Robot Services on you…Just joking. What are your plans for the future with this gem…
Thank you for your interest to my modest project and for supporting this enthusiastic community.
According to Stanislaw’s Lem “Summa Technologiae” robotics civilization should evolve as all biological objects do and therefore after “Mark 1”, which successfully passed home shoes tests, as you could see, there will be “Mark 2” which will use the same chassis but will have sonic sensor instead of IR, pair of photoresistors to be able distinguish light from darkness (or may be good from evil) and may be microphone if noise from motors will not be too loud to mute it. Also I would like to play with servos a little to move sonar around.
Besides that as final step of evolution I am planing “Mark 3” based on android platform with camera and OpenCV on board to react on my gestures, with stepper motors for more accurate positioning and good quality microphone to distinguish voice commands. Now I am choosing stepper motors and drivers for them calculating motor’s torque based on “Mark 3” weight and experimenting with OpenCV basic functions.
All this works will take a lot of time of course as soon as I am also busy with my office job.
Also I will be glad if my first creature will inspire someone to start making robots - this is very interesting and pleasant hobby !
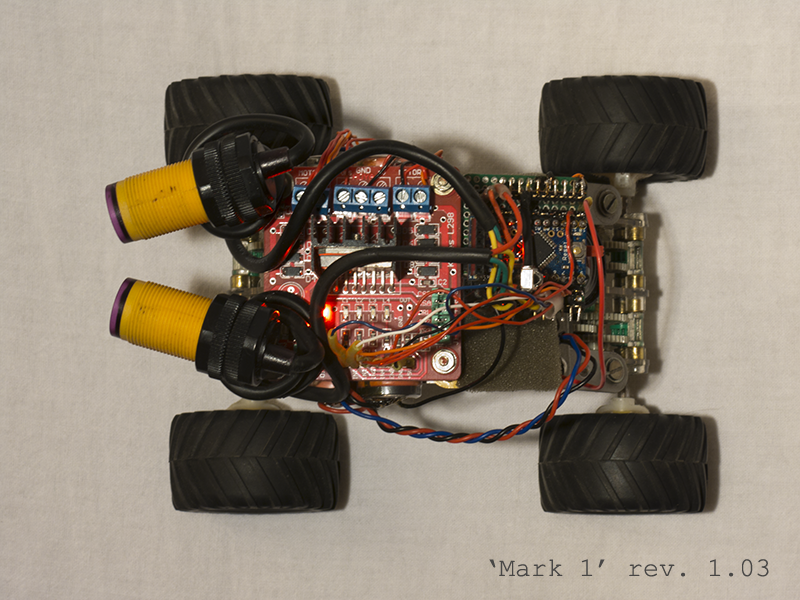
I really like those IR sensors. I’m going to use them on my project. Why did you angle them to cross over each other? I suspect to increase the peripheral field of vision but I can’t find any specifications to support that. I think we would need to know the measuring angle to figure that out and I can’t find anything that specifies it. When configured like that, do you see any interference? Also, do you ping them both at the same time or seperately?
I will answer to all of your questions with pleasure
Of course there is a reason to make him cross-eyed - to avoid сollisions with things in “blind zone”. If you will look at following diagram you will understand it without any explanations:
First revision was done as A case and every chair leg was a serious problem. After crossing-eyes
operation (and changing in code left and right sensors) every such barrier can be seen - the only thing we need to do is to find optimum angle of sensors - I have done it empirically making few experiments - it was really fun !
To increase FOV you only need to make angle more wide - this sensors are digital and gives low state when there is ray collision - you can change the distance of measure by adjusting screws on them. The rays are very narrow so the distance and angle are only things you can play with.
I did not notice any interference - they are working perfect in this configuration and - yes - I am pinging them both almost at the same time. If you are interesting in I can send you source code - it is very simple.
Wish you good luck with your project - fill free asking me again if you will have other questions.
Can I purchase this working models, Just wanted to share with my kids or conducting knowledge workshop with neighbour kids. If yes please let me know the process and price. Thanks!
I am very glad that you like this model. Your inquiry is little bit surprisingly to me because I did it just for fun and did not have any business plans. I have discussed it with my wife and we came to conclusion that we love MARK-1 too much and prefere to leave him at our home.