



Mark 1
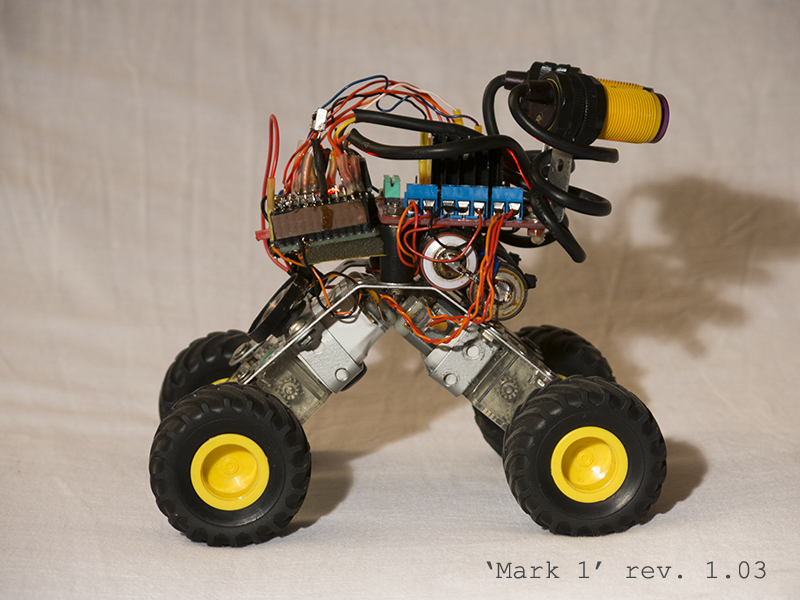
This is my first very simple robot that reads information from two IR sensors and makes decision about moving to work around barriers. The main aim was to make him as powerful as possible so 4 DC motors with two Tamiya 70168 double gearboxes was used in construction to implement 4x4 formula. Also manual controlling is possible using IR remote control from my old Pioneer CD-player.
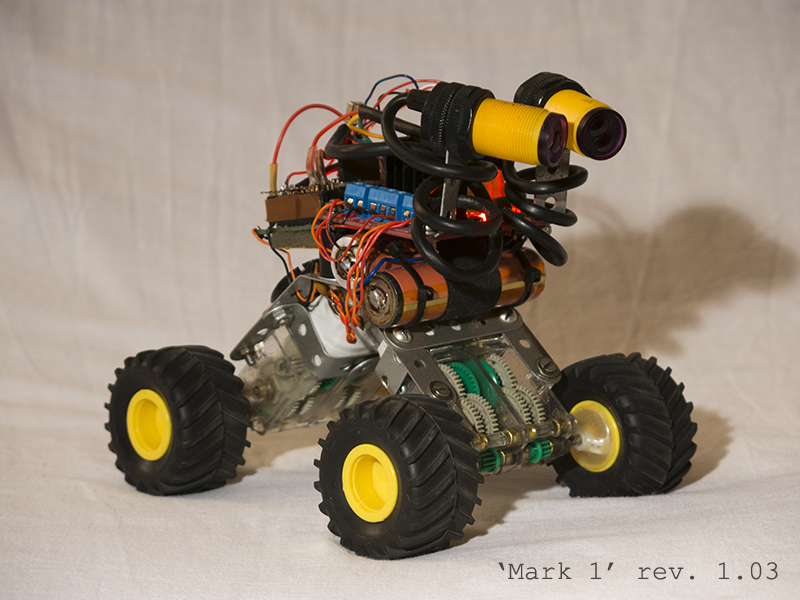
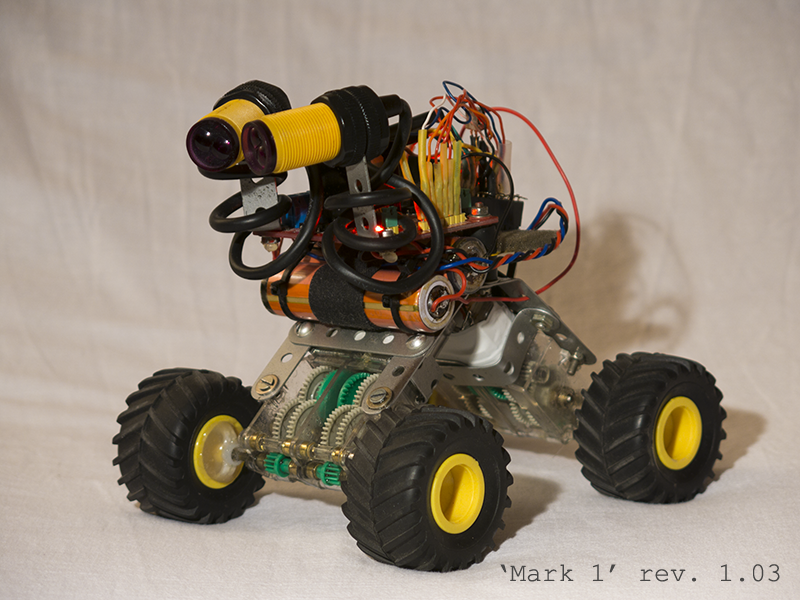
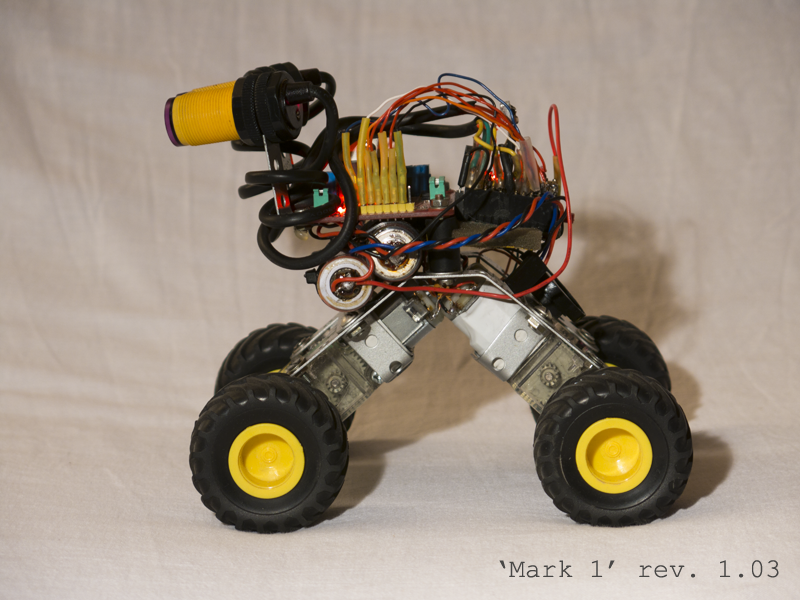


New revision with improved design:

Simple moving and working around all barriers getting notifications from IR sensors.
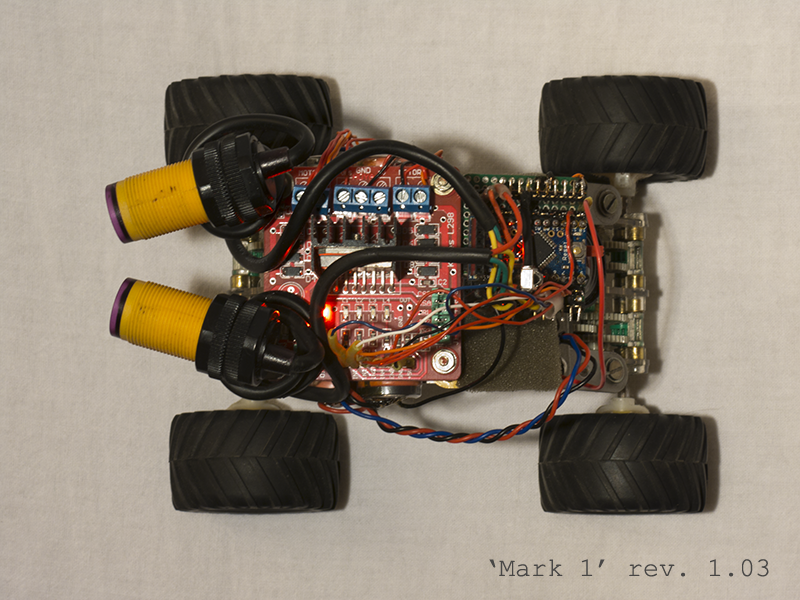
- Actuators / output devices: Buzzer, 4 DC motors in TAMIYA 70168 with H-bridge motor driver bassd on chip L298N
- Control method: autonomous, Manual (by CD IR remote control)
- CPU: Atmel ATmega328
- Operating system: Arduino
- Power source: NCR18650BF 18650 Sanyo Panasonic li-ion battery (x2)
- Programming language: C++ (Arduino)
- Sensors / input devices: IR sensors E18-D80NK (x2 as eyes), TL1838 (VS1838) as remote commands receiver
- Target environment: indoor