
With the launch of the Lynxmotion Smart Servo (LSS) motors, it was only a matter of time before robots would be developed around them. Are you interested in participating or following the progress or contributing to their development? You can click on each thread to follow the process, or discuss robots in general here.
3 Likes
Current Lynxmotion SES V2 robots include:
SES V2 3DoF Arm
This is a three degree of freedom robotic arm which uses three ST1 smart servo motors and a double four-bar mechanism to keep the gripper at a fixed angle with respect to the ground.
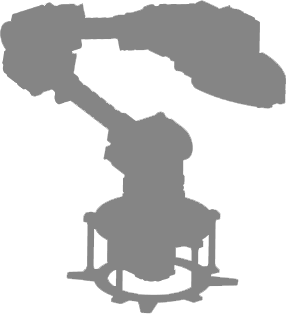
SES V2 4 DoF Arm
This is a four degree of freedom (upgradable to five degree of freedom) robotic arm which makes use of both HT1 and ST1 smart servos. This is an articulated robot arm where each joint contains an actuator, much like those found in industry.
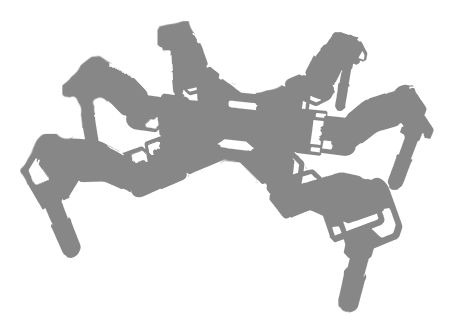
SES V2 Hexapod
This is an 18 degree of freedom hexapod walking robot (three degrees of freedom in each leg) which is intended to mimic the motion of six-legged insects. it uses 18 ST1 smart servo motors.
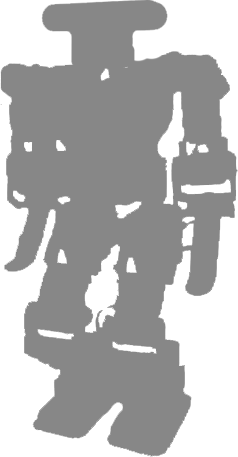
SES V2 Humanoid
This is an 18 degree of freedom humanoid robot (five DoF per leg, three DoF per arm, two DoF in neck) which uses HT1 smart servo motors.
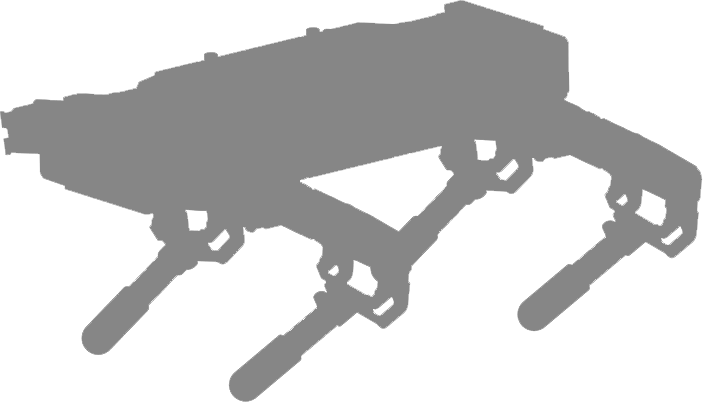
SES V2 Quadrapod: MechDog
This quadrapod walking robot uses three ST1 smart servos in each leg and allows for experimentation using mammalian walking gaits.
Browse all Lynxmotion threads here:.
2 Likes







