Welcome one and all! With the launch of the Lynxmotion Smart Servo (LSS) motors, it was only a matter of time before legged robots would be developed around them. This thread is intended to allow all those interested in the project to follow the design progress, offer insights and help in the development of these robots.
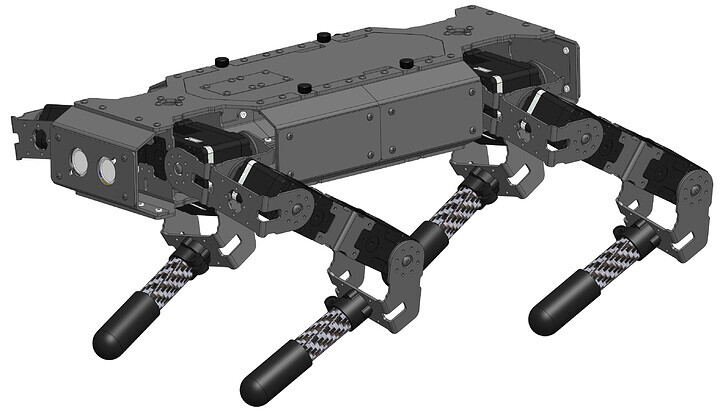
The main objective of this project is to develop and ultimately release a 12 degree of freedom (DoF) “mammal” style quadrapod using the LSS actuators and much of the SES V2 bracket and electronics system. Potentially using a Raspberry Pi 4 as the “brain”, running ROS 2.0, we hope participants here will help create the most advanced, adaptive and responsive inverse kinematics system for this type of robot.
BACKGROUND
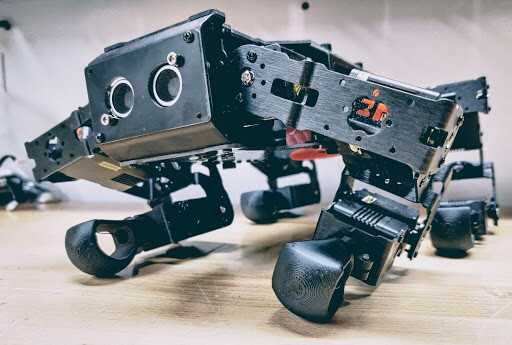
User mechdickel has been working with RobotShop to evolve his MechDog project into a commercial, SES-based quadrapod robot.
Nice to see some interest, you can find the STL/STEP file on THIS page.
Might or might not be the final design but so far it seems to be working great.
I love that this is all controller via an Arduino Uno. I’d love to see what can be done in the future with pairing that Uno with a Raspberry Pi or a Jetson Nano and adding some machine learning to it.
A webcam and a python/C# application would be able to allow for some object detection, obstacle avoidance, marker following etc. That would be awesome.
A Raspberry Pi CM4 compute module would allow for a custom board to be designed to fit nicely inside a space in the controller, too!
Ah man, that’d be so, so fun to try.
Once the kit/code is available I may take a look at a Pi/arduino ROS setup.
The code wouldn’t require much changing on the Arduino side, it would just be receiving instruction from the Pi rather than a controller. A controller would still work of course, but it’s be connected straight to the Pi via Bluetooth.
LOL - Thanks for all the kind words.
Still need to figure out what would be included in “kits” as the controller & brain as well as finalize the options.
At the moment the feets are 3D printed and hold up well, might stick with that option for the start since injection molding add quite a cost to them.
It’s exciting how it’s coming together.
Yeah 3D printing makes complete sense for the feet; not only for the cost, but it also allows for customisation options with different grip patterns, different materials (soft ninjaflex feet, hard ridged feet etc) and it also allows cheap replacement for damaged ones.
Have you a rough idea of a projectd price for any kit?
I know at this stage it’s impossible to predict an accurate price until all things are settled on, but just curious if there’s a target price in mind.
Not at that point but the servos themselves are a big part of the end price (12x LSS-ST1)
Other than that the kit content is not fixed, we are still wondering which controller to use.
Yeah that is going to be the biggest outlay. If there was a version of the kit that was everything but the servos it would allow folks to build it in stages and pick up them up as and when they can. That would be the most appealing option to me.
Oooh is there a shortlist of controller options?
Something ESP32 based would be hard to beat. Cheap, Arduino compatible and feature rich. Bluetooth and WiFi included for allowing interaction with other modules in the future, and allowing wireless communication in the future with raspberry Pi modules and suchlike for ROS or a more custom machine learning solution.
Another shout for the controller option could be something around the new Raspberry Pi Pico.
Really cheap, plenty of power, and the chip itself is available for creating custom boards. I have a few; using one as and macro keyboard with a 4x4 RGB keyoad, and also just picked up and other one with a pack to use as a DAC for my Laptop. The Pico is only £4 full price, although I managed to get one for free and in for half price via various offers on sites like Pimoroni etc.
At the moment we have a limited selection of controller (brain) as well as remote that can be used to be packaged as a kit.
That said, it will also be sold without the controller.
Frame is made to accept multiple board mounting, including Raspberry Pi / Arduino UNO & BotBoarduino.
Hey, thanks for sharing this!
I’m currently working on a review for a kit by a company called Totem, which is a spider built around two motors. Fascinating kit, great fun.
It uses an ESP32-based control board, and has a basic arduino library for controlling the motors and suchlike with the board.
It’s got a few GPIO pins broken out, so I’m going to start working on some code turning the controller into a slave responding to commands via serial, and then lash a Raspberry Pi into the chassis for a web based interface and in the future some machine learning.
If this one goes well I’d love to work on something with the mechDOG in mind. Once a controller is decided upon I’d be able to pick up a similar controller and use that to simulate the controller board.





")
")

