


I got bored watching my favorite sports team lose another game.
So I made my version of a "start here robot".
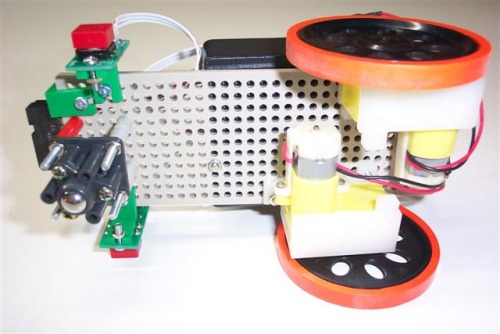
I call this thing "lil Scooty" and its made from spare parts, programmed in Logo.
Code:
to start
when [ ((sensor 0) > 440) ] [ ad, setpower 4
a, thisway
d, thatway
ad, onfor 45 ]
loop [ d, setpower 4
a, setpower 3
ad, thisway
ad, on
wait 25
ad, off
wait 25
ifelse (in 0)
[
d, off
a, setpower 4
a, onfor 25 ]
[ a, setpower 4
d, setpower 3
ad, on
wait 25
ad, off
wait 25
if (in 2)
[ a, off
d, setpower 4
d, onfor 25 ] ] ]
end
scoots around bumping into objects
- Actuators / output devices: 2 geared motors
- Control method: autonomous
- Programming language: Logo
- Sensors / input devices: Sharp IR, 2 bump switches
- Target environment: In Doors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/lil-scooty
Neato. I’m not familiar with
Neato. I’m not familiar with Logo programming. It was fun to look it up.
What sort of processor board is that on your robot?
RE
The short answer is a Freescale micro, though I have 2 other variations of these that have Atmel and Pic micro’s.
The long answer is that I work with a lot of school kids. These interpreted programming languages make it easy for them to learn to program at a high level without them knowing what they are doing. So they don’t build mental blocks before they give it a try.
Me, I keep a couple of these kits around so I can make stuff (robots) on a whim. Kind of like the old Erector sets (or Lego’s). I use Atmels when doing real projects.
Spend a few minutes and you have a working robot. Little thought involved, with the same basic results. Though there are a few cons to these as well. The main being all interpreted languages are slow (in micro processor terms) so they have limits on what they can do compared to a regular Arduino. Though personally I like this problem, as it forces the (K.I.S.S.) Keep It Simple mentality.
For those who don’t know the basic history of Logo:
Before there were Lego kits, there was Logo. It was invented by M.I.T. and its a interpreted language for educating children to program. The drag and drop programming of Lego is an evolution of the Logo language.The main difference is that this language runs on conventional micro boards (its loaded like a bootloader) instead of the shiny plastic controller box of Lego’s. So you see whats actually there.
Its setup where you can drag the blocks to program, or use a Basic like text language to make conventional robot parts work. ADC, PWM, serial RX/TX, timers, interrupts all work in this language.
Sorry I kind of got long winded there…
PS
I like your Venus Fly Trap robot!!!

