



lil Scooty



I got bored watching my favorite sports team lose another game.
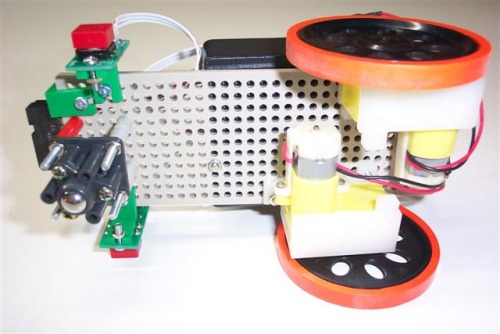
So I made my version of a "start here robot".
I call this thing "lil Scooty" and its made from spare parts, programmed in Logo.
Code:
to start
when [ ((sensor 0) > 440) ] [ ad, setpower 4
a, thisway
d, thatway
ad, onfor 45 ]
loop [ d, setpower 4
a, setpower 3
ad, thisway
ad, on
wait 25
ad, off
wait 25
ifelse (in 0)
[
d, off
a, setpower 4
a, onfor 25 ]
[ a, setpower 4
d, setpower 3
ad, on
wait 25
ad, off
wait 25
if (in 2)
[ a, off
d, setpower 4
d, onfor 25 ] ] ]
end
scoots around bumping into objects
- Actuators / output devices: 2 geared motors
- Control method: autonomous
- Programming language: Logo
- Sensors / input devices: Sharp IR, 2 bump switches
- Target environment: In Doors