My Name is Anthony, and I am a Robot Designer. Have a background in 3D graphics and Commercial Design, as well as a website designer.
I put that together with my love of robotics and LeXI 3000 is the result. She originally was to be a upgrade of the Omnibot 2000. I had seen a video of DJ Sears Omnibot 2000 over at the EZ-Robot.com site and was floored at the technology he added to a 1980's toy.
I had 2 omnibot 2000 sitting in my basement waiting for the technology to reach the point where my ideas can become a reality. So i bought an EZ-B robot kit and went to work. What started out being an upgrade grew day by day into a larger more complex build dew to my artistic ability and want for a more professional bot.
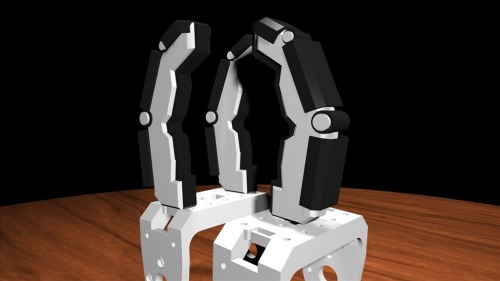
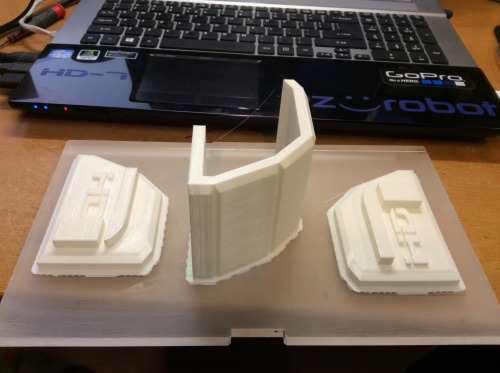
Everything changed for the better when i bought a Makerbot Replicator 2!. Now all my ideas can become a reality. I first designed LeXI's Claw. All 3d printed, then I designed her arms and so on. The final arm has 7 servos an bends at the wrist,elbow,shoulder and the wrist also bends up and down and twists.
The Claws are unique because you can easily change the finger/claw types by un-clicking and re-clicking on the different parts. I designed my parts to incorporate the EZ-Bits connect tech. Because she was growing taller and more heavy I upgraded her drive train to a 24v scooter drive.
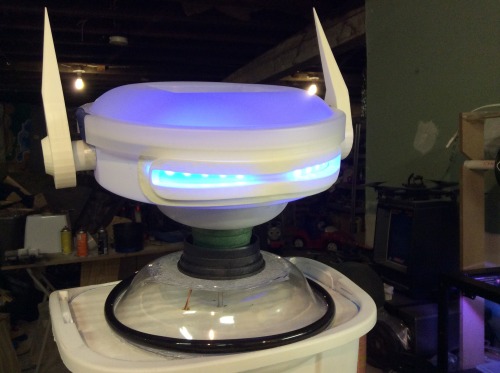
She also has a Acer A3 windows 8 tablet running all the software onboard with a front chest monitor connected with independent window. She can display videos play games etc.
She has voice and object recognition and the Ivonna Female true voice synthesizer.
She is 80% complete. she should beup and beta testing in a week. I will post her videos and updates as they come in.
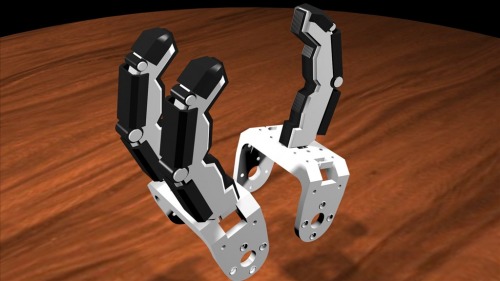
She has 2 custom 3d printed HD-7 Arms with interchangable claws.10 ultra sonic sensors 2 hd cameras.
Actuators / output devices: hitec servos for elbow joints, HD Robo Servos for arms, High Torque DC motors for shoulders. MG995 servos for neck and claws.
Control method: Bluetooth, Voice Command, tablet pc
CPU: EZ-Robot EZ-B v3
Operating system: windows 8
Power source: 4 x power sonic 12v 9a, 2 x 12v 25a
Programming language: EZ-Builder and EZ-Script
Sensors / input devices: Wifi Camera, Ultrasonic sensor with servo sweep, tablet pc gps
Hey Anthony ! Its awesome you started a robot submission. They really like for the builder to add build photos and videos up to date. When you log in and go to this robot submission you can click “EDIT”. On that edit page scroll down and you can paste in youtube videos by clicking the " Videos" section. There is also a “links” area to add in the links. Theres spaces for the controller type, motors used ect as well there. I had no idea how to add these in when I first started adding robots on here.
Seems like to me that it would be open all the time and instructions saying- Enter your pictures here- or - enter your links here- -please fill out these additional details. Just make it required to fill the blank before it can be submitted even if its “NA” . That would be the easiest way I imagine.
This is what I’m wanting to see although probably out of the price range of most of use here.
Think you’ll have a problem using the name “Omnibot”? A cutting edge project like this really needs it’s own name even if there’s no trademark on the “Omnibot” name. Actually I find it difficult seeing an Omnibot 2000 in there anywhere, you’re way beyond that now.
You asked if running your batteries in parallel would help. That really depends on whether or not your motor is drawing more current than you are currently offering. That would be easy enough to find out. You simply need to check the voltage while the motor is moving. If the voltage drops noticeably while the motor is moving, you probably need more current.
I am more curious how well everything will function when you actually start trying to move something like a full 12oz can.
she’s coming along real nice now. just a little tweaking and adding the new shoulder (wheelchair motors) motors for higher torque and the neck plate and she is done.
I do like the look of this robot and the way you build nice looking parts for it. But I think you are giving so much atention to the looks that you are forgeting some funcionality aspects. How will it navigate? I don’t see any integrated sensors to detect objects and walls or camera for image processing. It´s head can turn but it will be useless as you have not integrated any sensor in the head. If this robot is for remote control only just ignore this coment.
Don’t get me wrong, you are reaaly good with the design and the 3D printing stuff. This is just my constructive opinion.
thanks for the compliments, but yes it will have it sensors. i have 10 x HC-SR04 Ultrasonic Module sensors, 1 x ez-robot wireless cam for facial,color object tracking. Also the camera will read glyphs, qr codes. there is also a 5 mega pixel camera in the rear which is imbedded in the acer tablet for rear view images to shown on her fron monitor if needed. this is what im installing as of now. down the road with upgrades, GPS tracking. As of now she has google maps and the onboard gps in the tablet for location verification and some gps tracking.
I see we have distinct views, I’m more of a electronics and programming guy. My main concern is always to get the robot working, when I’m designing one I am focused in that.
I don’t get the tablet idea to, it’s not the best plataform for development because it’s not its purpose. You will have hard time putting sensor data in to it and get data out for actuactors. A tablet is a relatively closed system, maybe it is possible to use it but definatly not the best option at all.


 My Name is Anthony, and I am a Robot Designer. Have a background in 3D graphics and Commercial Design, as well as a website designer.
My Name is Anthony, and I am a Robot Designer. Have a background in 3D graphics and Commercial Design, as well as a website designer.