

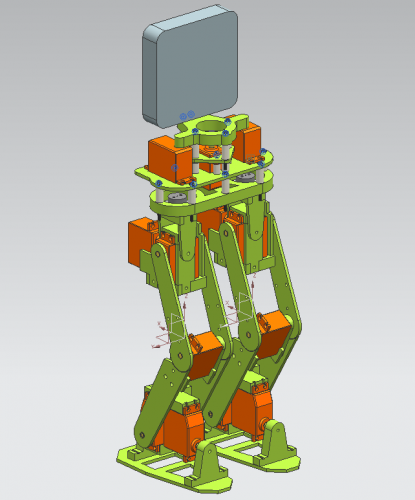
Here is my current project, bipedal robot. Nowadays, I am trying to make it walking. Harder than I thought before. It has 6 DOF per leg.
Parts of Robot:
- 3mm, 5mm and 10mm Laser-cut-Acrylic sheets (Black)
- 12 x Hobbyking HK15298B Servo Motors (7.4V / 20kgcm / ~68gr) (http://tinyurl.com/d8ca5ls)
- Pololu Mini Maestro 24
- Turnigy 4500mAh 2S Lipo
More update and Videos will arrive soon...
Walking, standing, sitting down
- Actuators / output devices: Servo motors
- Control method: Serial Port, Pololu mini maestro
- Power source: 7.4V 4500mAh LiPo
- Programming language: C
- Target environment: indoor, outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/kubot-legs