This is a project for a competition called "robogame" held by studuents in USTC.It's a five-member team and I'm one of the team .We want to make a robot which can solve Rubik's cube problems and do some other jobs(Our main purpose is to make a humanoid robot solving Rubik's cube problems ).we have finished design in July.Now we are working to build it .
This is a project for a competition called “robogame” held by studuents in USTC.It’s a five-member team and I’m one of the team .We want to make a robot which can solve Rubik’s cube problems and do some other jobs(Our main purpose is to make a humanoid robot solving Rubik’s cube problems ).we have finished design in July.Now we are working to build it .
Hey nice project. can you please tell me how much torque is required by the motors to turn the rows and columns and also how much you will need to grip the cube firmly. And also It would be cool if the robot could manipulate a 555 cube cause the solution canbe easily derived from a C++ program and the difficult part lies in of moving the pieces of the cube to get to the solution. :)
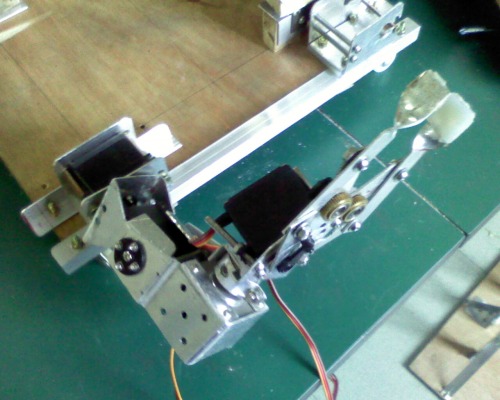
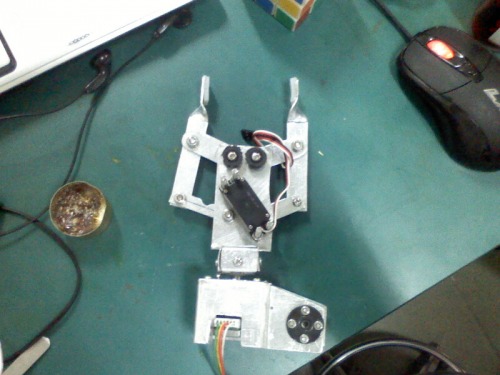
It take only a little strength to turn the rows of the cube.But it takes much more torque to grip the cube firmly.We have tried many ways. We have found MG995 can be a good choice.you can view
to get more info about this servo.In fact ,It can not give as much torque as it claimed.In our test,It takes about 10Ncm to grip the cube firmly.this kind of robot is hard to manipulate a 55*5 cube because its structure.
So you will be using different servos for building the robot. so then there will be 4 servos 2 in each arm and the gripping servo will be the one you mentioned and the manipulation servo will be an other low torque one. And how much is the total budget of the rig.
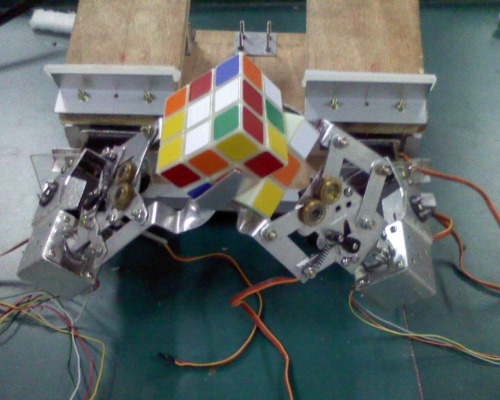
and also I have a small doubt. How do you turn the rows of the cube in the second and third positions(marked above). The first row can be turned by the arm 1. how do you turn the other faces.
To turn row 1,I can use stepper motor on arm 1.To turn row 2 is not necessary,The solution to the cube do not need to turn the row in the middle of the cube.To turn row 3, use stepper motor on arm 2 to turn 180 degrees.then stepper motor on arm 1 is able to turn row 3