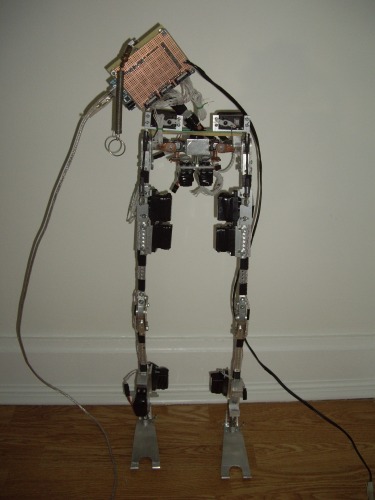
The platform is finished. Now to start with programming ideas!
In the original blog about this robot I said that Iwould build it using simple tools. Band saw, drill press, belt sender, and hand tools. Even though the robot came out very well there were some sacrifices by not using a milling machine which I don't have or having someone machine it for me. The Hip joint ended up being looser then I would have hoped. I have added elastics for the moment to take up some of the play and there are more permanent things that I will try to make the joints tighter.
The robot which is 60% my size has 12 servos. Originally there were to be 14 but I changed the design which made the build and future programs simpler. At the moment the spine doesn't have any servos connected to it so it has been taped to make it a bit ridged.
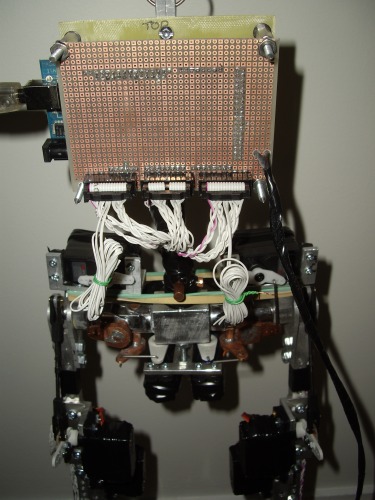
The left and right leg wiring harnesses are identically made so that it helps with trouble shooting. They are on the outsides of the board. The center harness is for the hip controls. The controller at this time is the Arduino Mega. It is connected to the system through the interface board so to keep it clear of any external switches, plugs and problems.
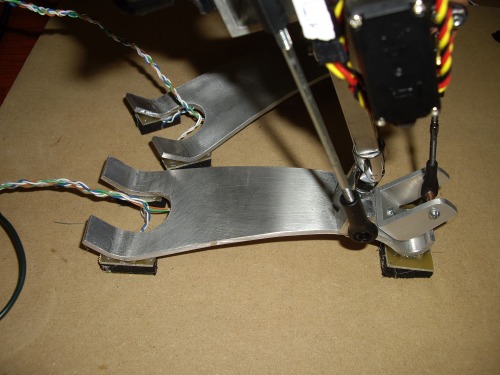
Above are photos of the pressure pads I built for the feet. Forgive the low quality of work on them as they are temporary. There are 3 pads per foot at the moment, 2 in the front and one in the back. What I intend to do is to have to 2 front pads adjust the swing of the foot left to right, and the sum of the 2 front pads with the back pad swing the body on the foot forwards back words. The combination of the 3 pads should keep the center of gravity in the middle of the foot.
The pads are made of a sheet of brass on one side of the pad and a piece of PCB board with the cupper towards the inside on the other side of the pad. The center is the black foam that you find your IC's on.
Yes your comment about the servos. They are at max capacity and some are over. I will be replacing them eventually with something a lot heavier. These are 50 inch/ounce,the future ones will be at least 200 inch/ounce and if I can strain my wallet I will get the HiTech HS-M7990TH611 inch/ounce of torque.
This is amazing, but it looks like it’s going to be a pain if you manually program it. Maybe you could have a processing program output servo commands to the arduino in order to get a working walking subroutine?
The difference in price for better servos where needed is only an extra $150.
I wanted the cheapest because they are temporary. Eventually the servos will be replaced with linear screw actuators which I will build myself. In the mean while I didn’t want to lose out on programing time.
Well the primitive pressure sensors seem to be doing a decent job adjusting each leg side to side. Next step is to add the heal, then have both feet work together, and last switch the pads for some pressure transducers.
Well the robot was never designed to have an upper body.
The section with the PCB that is flopped over has everything that is needed for servos to be attached to it so that its upright. I have not put them in as I don’t needed now.
The purpose of this robot is to learn the art of standing, balancing, and of course walking.
When I get to the state of this robot being able to walk gracefully then I will build a bigger stronger unit with an upper body.
Building a biped this size and getting it to stand by itself is a major feat! I think it is an big project and I live in awe of the way it is coming along… babysteps indeed!
It’s been a while since I have been on here, work/life gets in the way. Anyways I have some new pictures of the robot that I would like to share.
The original design has been heavily modified from the original mainly due to the cost of servos that were needed.
Above are photos of the original foot and the new fiberglass foot that is fitted with 62 points for the pressure pads (http://www.technobotsonline.com/materials/smart-materials/pressure-sensitive-materials.html). I have tested these pads but not at this quantity so it should be fun.
The servos were replaced with surplus worm motors. The assembly did not come with a acme nut so I had to cast it out of fiberglass inside the 3/4" cupper coupling (standard house water supply tubing).