



Humanoid

From concept to reality.
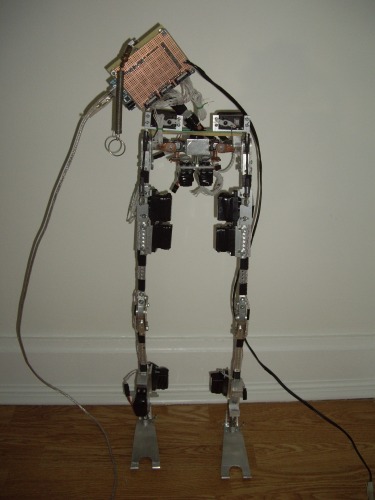
The platform is finished. Now to start with programming ideas!
In the original blog about this robot I said that Iwould build it using simple tools. Band saw, drill press, belt sender, and hand tools. Even though the robot came out very well there were some sacrifices by not using a milling machine which I don't have or having someone machine it for me. The Hip joint ended up being looser then I would have hoped. I have added elastics for the moment to take up some of the play and there are more permanent things that I will try to make the joints tighter.
The robot which is 60% my size has 12 servos. Originally there were to be 14 but I changed the design which made the build and future programs simpler. At the moment the spine doesn't have any servos connected to it so it has been taped to make it a bit ridged.
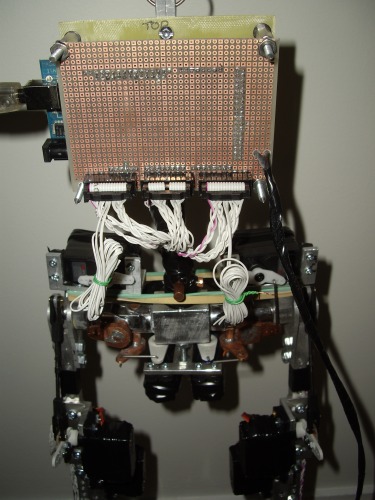
The left and right leg wiring harnesses are identically made so that it helps with trouble shooting. They are on the outsides of the board. The center harness is for the hip controls. The controller at this time is the Arduino Mega. It is connected to the system through the interface board so to keep it clear of any external switches, plugs and problems.

above is a photo of the knees.
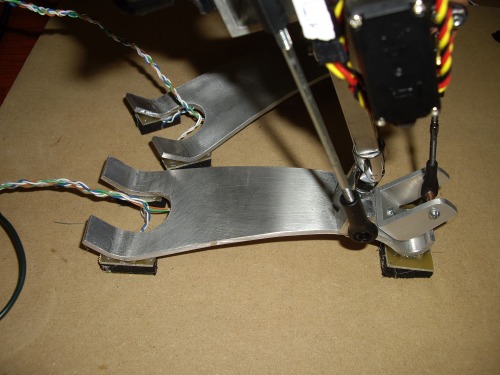

Above are photos of the pressure pads I built for the feet. Forgive the low quality of work on them as they are temporary. There are 3 pads per foot at the moment, 2 in the front and one in the back. What I intend to do is to have to 2 front pads adjust the swing of the foot left to right, and the sum of the 2 front pads with the back pad swing the body on the foot forwards back words. The combination of the 3 pads should keep the center of gravity in the middle of the foot.
The pads are made of a sheet of brass on one side of the pad and a piece of PCB board with the cupper towards the inside on the other side of the pad. The center is the black foam that you find your IC's on.
This was built to help me with programming
- Actuators / output devices: JRSport ST47BB
- Control method: autonomous
- CPU: Arduino Mega
- Operating system: Mac OSX and Windows 7
- Power source: 7.2V battery
- Programming language: C++, Python
- Sensors / input devices: none yet
- Target environment: work table