How to Make a Drone / UAV - Lesson 1: Terminology
How to Make a Drone / UAV - Lesson 2: The Platform
How to Make a Drone / UAV - Lesson 3: Propulsion
How to Make a Drone / UAV - Lesson 4: Choose a flight controller
How to Make a Drone / UAV - Lesson 5: Assembly
How to Make a Drone / UAV - Lesson 6: Get it all working together
How to Make a Drone / UAV - Lesson 7: FPV & Long-range
How to Make a Drone / UAV - Lesson 8: Aircraft
So you’re looking to get into drones and UAVs? This tutorial series is designed to help you understand the emerging field of UAVs and guide you through the process of building your own UAV using off-the shelf parts. The terminology and definitions used here are intended to give you, the reader an understanding of each term rather than a dictionary definition. Although many words may have multiple meanings, the definition is used in the context of UAVs / Drones.
Terminology
Types
| ARF |
"Almost Ready to Fly": a UAV which comes assembled with almost all parts necessary to fly. Components like the controller and receiver may not be included. |
| BNF |
"Bind and Fly"; the UAV comes fully assembled and includes a receiver. You only need to choose a compatible transmitter and "bind" it to the receiver. |
| DIY |
"Do It Yourself", which is now commonly used to mean "custom". This normally involves using parts from a variety of different suppliers and creating or modifying parts. |
| Drone |
This is synonymous with UAV. The term "drone" seems to be more common for military use whereas "UAV" is more common for hobby use |
| Hexacopter
|
A UAV which has six motors / propellers. |
| Multirotor |
"Multirotor" simply means an aircraft with multiple rotors |
| Octocopter |
A UAV which has eight motors / propellers. |
| Quadcopter |
A UAV which has four motors / propellers and four support arms. Configurations are normally "+" (the front of the UAV faces one of the arms) or "X" (the front of the aircraft faces between two arms). |
| RTF |
"Ready To Fly": a UAV which comes fully assembled with all necessary parts. Simply charge the battery and fly! |
| Size (mm) |
"Size" is normally provided in millimeters (ex 450mm) and represents the greatest point to point distance between two motors on a UAV. Size can also determine the "class" of UAV (micro, mini etc) |
| Spyder |
A "Spyder" type UAV (normally quad or hex) is one where the supporting arms are not symmetric in bot haxes when looked at from the top. |
| Tricopter |
A UAV which has three motors / propellers, and usually three support arms |
| UAV |
"Unmanned Aerial Vehicle" (of any kind) |
| V-Tail |
A UAV which has four arms, of which the rear two are at an angle to form a 'V' |
| X4 / X8 |
X4 and X8 are UAV configurations with four support arms; X4 configurations have one motor at the end of each arm, whereas X8 have two motors per arm (one facing up, the other facing down) |
| Y3 / Y6 |
Y3 and Y6 are UAV configurations with three support arms; Y3 configurations have one motor at the end of each arm, whereas Y6 have two motors per arm (one facing up, the other facing down) |
 Quadcopter Quadcopter
|
 V-Tail V-Tail
|
 Octocopter Frame Octocopter Frame
|
Mechanics
| CG |
"Center of Gravity"; this is the point on the aircraft where there is equal weight distributed on all sides. |
| Clamp |
A "tube clamp" is a device normally used on a round tube in order to connect it to another device (such as a motor mount or a UAV's body). |
| Connectors |
In order to plug and unplug wires, connectors are used at the ends of wires. Common connectors for batteries are Deans & XT60, while connectors for the flight controller and sensors are 0.1" spaced |
| Dampeners |
These are molded rubber parts used to minimize vibration transmitted throughout a UAV |
| Frame |
The frame is like the "skeleton" of the aircraft and holds all of the parts together. Simple frames have motors connected to aluminum or other lightweight extrusions ("arm") which then connect to a central body. |
| G10 |
This is a material commonly used instead of carbon fiber to make a UAV's frame since it is very rigid and lightweight, but significantly less expensive |
| Landing Gear
|
Multirotor landing gear normally does not have wheels as you might find on an airplane - this is to prevent it from moving when on the ground and reduce overall weight. |
| LED |
"Light Emitting Diode". These are used to make the UAV visible, primarily at night or low lighting conditions. |
| Prop Guards |
"Propeller guards" are material which curround a propeller to prevent the propeller from contacting other objects. They are implemented as a safety feature and a way to minimize damage to the UAV |
| Retract |
"Retractable" normally refers to landing gear which has two positions: one for landing and takeoff, and another, which takes up less room or improves visibility, during flight. |
| Shell |
This is an aesthetic / functional cover used to improve resistance to the elements and sometimes improve aerodynamics. Some production UAVs only have a plastic shell which also acts as the "frame". |
 Anti-Vibration Dampener Anti-Vibration Dampener
|
 Simple Landing Gear Simple Landing Gear
|
 UAV Shell UAV Shell
|
Propulsion
| BEC |
"Battery Eliminator Circuit": a voltage regulator built into the ESC which can provide regulated 5V DC power to any electronics which need it. |
| Blades |
Propeller blades are the aerodynamic surface which generates lift. A propeller normally has two to four blades which can be fixed or folding. |
| CW / CCW |
CW indicates Clockwise rotation and CCW indicates Counter-Clockwise rotation. On a multi-rotor aircraft, you would normally use pairs of counter-rotating propellers. |
| ESC |
"Electronic Speed Controller" is the device which connects to the battery, motor and flight controller and controls the speed at which the motor rotates |
| LiPo |
"Lithium Polymer" is the most common battery used in drones and UAVs because of its light weight (versus storage capacity) and high current discharge rates.
There are other types of Lithium-based batteries available on the market as well (LiFe, LiMn, LiOn etc) |
| Motor |
The motor is what is used to rotate the propellers; in small UAVs, a brushed motor is most often used, whereas for larger UAVs, a "brushless" motor is much more common |
| PCB |
A "Printed Circuit Board" is the flat fiberglass part with many components soldered to it. Many electronic products have a PCB. |
| Power Distribution
|
In order to power so many different devices used in a UAV, the battery must be split, which is where the Power Distribution (board or cable) comes into play.
It takes the single positive and negative terminals of the battery and provides many different terminals / connection points to which other devices (operating at the same voltage) can receive power. |
| Propeller |
The propellers are what provides the thrust and are more similar to those used in airplanes rather than on helicopters. |
| Prop Adapter |
A device used to connect the propeller to the motor. |
| Prop Saver |
A type of hub which mounts on top of your motor and replaces the prop adapter. In he event of a crash, a part of the prop saver is lost in an attempt to save the propeller. |
| Servo |
A servo is a type of actuator which, provided the right signal, can move to a specific angular position |
| Thrust |
The "thrust" is the force which a specific motor and propeller can provide (at a certain voltage). Usually measured in kilograms (Kg) or pounds (Lbs) |
 LiPo Battery LiPo Battery
|
 CW / CCW Propellers CW / CCW Propellers
|
 Power Distribution Board Power Distribution Board
|
Control
|
Base / ground /
Control Station
|
Instead of (or in addition to) a hand held transmitter, a station (normally in a case or mounted to a tripod) is used to house / integrate the necessary components used to control a UAV.
This can include the transmitter, antenna(e), video receiver, monitor, battery, computer and other devices. |
| Binding |
The term "binding" refers to configuring a handheld transmitter so it can communicate with a receiver; if a transmitter came with a receiver, it should have been done at the factory. |
| Channel |
The number of channels on a transmitter relates to the number of separate signals it can send |
| Flight Controller |
The "Flight Controller" is what would be considered the "brain" of a UAV and handles all of the data processing, calculations and signals.
The core of a flight controller is often a programmable "microcontroller". The flight controller may have multiple sensors onboard, including an accelerometer, gyroscope, barometer, compass, GPS etc.
If the flight controller has the ability to control the aircraft on its own (for example to navigate to specific GPS coordinates), it may be considered to be an "autopilot". |
| Harness |
This usually refers to the "Wiring Harness" which are the wires that connect the receiver to the flight controller (and sometimes other devices). |
| HF/ UHF / VHF |
"High Frequency"; "Very High Frequency" and "Ultra High Frequency" radio waves. Units are in Hz (Hertz) |
| Receiver |
This is what processes the information received wirelessly |
| Sketch / Code |
This is the program which is uploaded to your UAV's flight controller (similar to a "thought process") |
| Transmitter / Radio
|
The "transmitter" is what generates the control signal(s) wirelessly to the receiver |
 Base Station Base Station
|
 Transmitter Transmitter
|
 Flight Controller Flight Controller
|
| Accelerometer |
An accelerometer measures linear acceleration in one to three axes. Units are normally in 'g' or gravity. An accelerometer can provide your drone's orientation with respect to ground |
| Antenna |
Antennas are what actually receive or send a signal to and from a UAV (the signal itself having been generated by a transmitter unit).
They come in a variety of different types and include directional (strongest in one direction) and omnidirectional |
|
Barometer / Pressure
/ Altimeter
|
A Barometer is used to give feedback as to the altitude of the UAV. It measures pressure, and since pressure changes with altitude, your aircraft can "know" its height. |
| Compass |
A magnetic compass can provide your compass heading (north / south / east / west) |
| Flight Recorder |
A flight recorder records sensor values from your UAV. This feature can sometimes be integrated into the flight controller. |
| GPS |
"Global Positioning System": satellites orbiting the planet send out signals which are picked up by the GPS antenna and are sent to be processed by the GPS receiver to provide geographic coordinates |
| Gyroscope |
A gyroscope measures angular acceleration in one ot three axes. Units are normally degrees per second squared. |
| IMU |
"Inertial Measurement Unit" combines an accerleometer and a gyroscope |
| Magenetometer |
In low cost robotics, a magnetometer is sometimes used to provide compass direction |
| Pitch |
Pitch is the angle of the nose to tail with respect to the ground, or in other words, the rotation of an aircraft about the axis from wing to wing |
| Pitot Tube |
A device which measures air speed |
| Roll |
Roll is the rotation of the aircraft along the axis from its nose to its tail |
| Yaw |
Yaw is the rotation of an aircraft about an axis perpendicular (90 degrees to) to the plane formed between the nose / tail and wing tips |
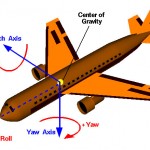 Roll / Pitch / Yaw Roll / Pitch / Yaw
|
 Airspeed Sensor Airspeed Sensor
|
 GPS Module GPS Module
|
| FPV |
"First Person View": The UAV is mounted with a camera and the operator has a live video feed displayed on either a monitor or virtual reality glasses |
| Gimbal
|
A devices which carries a camera and is normally actuated using either a servo motor or a brushless DC motor. A gimbal is what can stabilize a camera in flight. |
| GoPro |
The GoPro series of action cameras is widely used for taking and/or transmitting video |
| LCD |
"Liquid Crystal Display" is a type of screen / monitor used to display the image received by the receiver |
| OSD |
"On Screen Display" provides text on the monitor / screen which is being sent from the aircraft (can include altitude, GPS location etc.) |
| VR |
"Virtual Reality" glasses or goggles provide the operator with a more "immersive" experience |
 2-Axis Gimbal 2-Axis Gimbal
|
 LCD Monitor for FPV LCD Monitor for FPV
|
 VR Glasses VR Glasses
|
Do you Really Want a Custom UAV?
The choice of UAV depends on how much you want to learn about the field. Building a custom UAV can be quite involved as well as dangerous. If you would prefer to simply "get in the air" quickly, we'd suggest the following, in increasing order of complexity:
Multi-rotor toys are becoming increasingly popular. Most are small, and can fit in the palm of your hand, though some like the A.R. Drone Parrot are larger. Toy multi-rotor UAVs are not necessarily easy to fly, but are more resistant to crashes. Toys tend to be smaller and integrate the frame into the aesthetic shell.
A "Ready To Fly" kit includes all the parts needed for a complete UAV. Parts include the UAV itself (most often pre-assembled and pre-wired), the hand held transmitter, a battery and charger. The craft is calibrated and should be able to fly with relative ease. These are not however indestructible, and a crash may damage the system to the point where it is simply worth buying a new aircraft rather than attempting to repair it.
An "almost ready to fly" kit is one where the frame, motors and most of the "core" parts are included and fully assembled (or a few parts need to be assembled, largely to help with shipping). Normally an ARF kit requires the addition of a transmitter / receiver and perhaps batteries and charger. Other ARF kits do not include the flight controller itself. You may need to do some calibration because of the additional parts required. We do not suggest a BNF kit as not all transmitters and receivers are compatible with one another.
A kit normally includes most of the important products needed to build a UAV, but may not include the transmitter / receiver, battery and charger or flight controller. Different kits have different package contents, so it is important to see exactly what is included and what additional items will be needed. The contents of a kit should be compatible with one another.
A custom setup is where you combine a variety of different products from a variety of different manufacturers and get them to work together. This approach requires that you understand which components are needed to make a UAV and will be the focus of this series of articles.
Do you see terms which are missing and would be useful? Feel free to add them in the comments below.
This is a companion discussion topic for the original entry at https://community.robotshop.com/tutorials/show/how-to-make-a-drone-uav-lesson-1-terminology


 Quadcopter
Quadcopter
 V-Tail
V-Tail
 Octocopter Frame
Octocopter Frame
 Anti-Vibration Dampener
Anti-Vibration Dampener
 Simple Landing Gear
Simple Landing Gear
 UAV Shell
UAV Shell
 LiPo Battery
LiPo Battery
 CW / CCW Propellers
CW / CCW Propellers
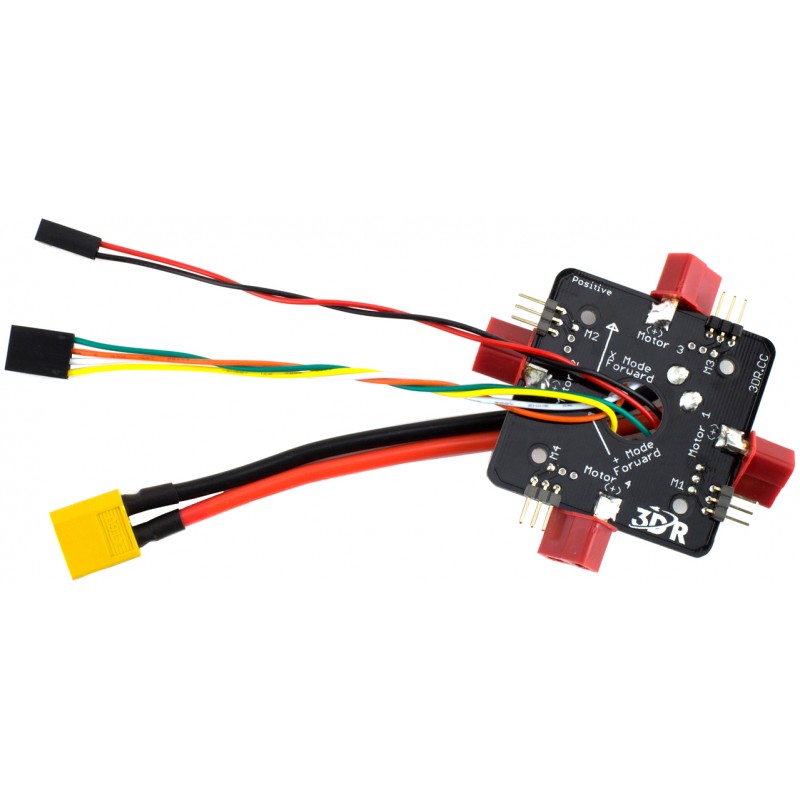 Power Distribution Board
Power Distribution Board
 Base Station
Base Station
 Transmitter
Transmitter
 Flight Controller
Flight Controller
 Roll / Pitch / Yaw
Roll / Pitch / Yaw
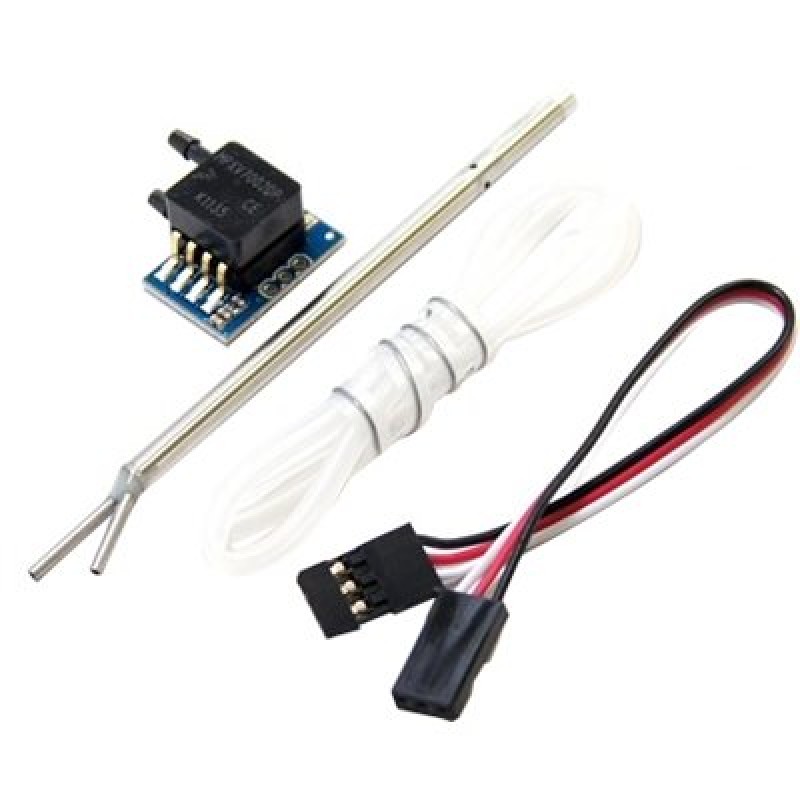 Airspeed Sensor
Airspeed Sensor
 GPS Module
GPS Module
 2-Axis Gimbal
2-Axis Gimbal
 LCD Monitor for FPV
LCD Monitor for FPV
 VR Glasses
VR Glasses