I’m really impressed by the size and aesthetics aswell.
I really like walkers. I hope to be able submit soon a quadruped with picaxe and 8g servos.
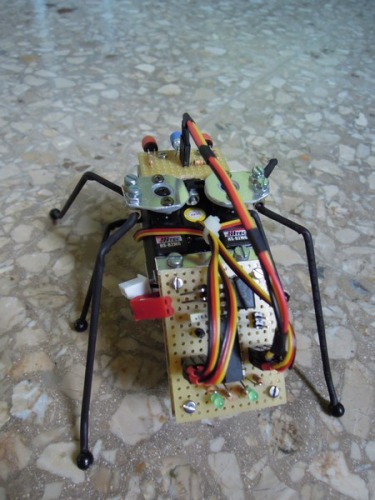
Your cables are well tighten, while mine going in any direction, a bit messy…
I’m planning to try Lipo. You might have a 5V regulator for the picaxe, do you have another one for the servos or do you feed them with 7,4 V? What’s the capacity of your voltage regulator ?
What’s the capacity of you Lipo battery in mAh ?
Would you have an idea of how much amp draw your servos ?
Thank you for your post at my start here robot. I’m not courageous enough to write both in French an English as you, but it’s nice to find some other French here on LMR.
I finnaly post the quadruped. My 4xAA battery pack is out of order that’s why I’m so interested in you Lipo capacity and voltage regulator. I was also offered few month ago an Arduino uno. I have not been able to look deep enough at it, but it looks that 7.4V Lipo is much more convenient for the Uno than the 4xAA NiMh I use for Picaxe.
I have in mind to try a Picaxe biped, when I’ll finish the actual quadruped and wheight is an important matter.