Ok, so I need to make a video of this, but ill try to explain it the best that i can!
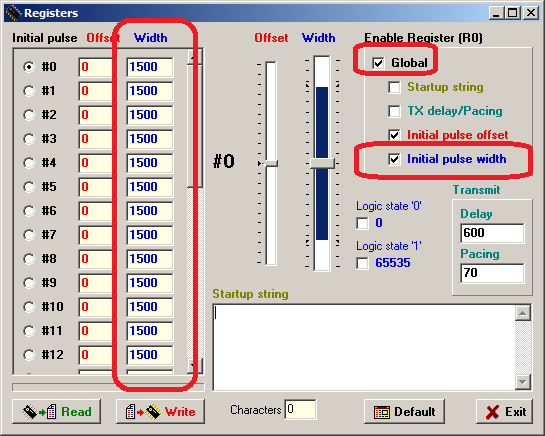
So, I have the USB hooked back up on the SSC32u and opened “lynxterm”. I power on the Spider using the 7.4v battery and the legs of the spider are all contorted, so I know that I will need to set and calibrate em! In the terminal, I click the “All 1500” to center all servos, and the spider goes into the crouching state (like a spider protecting itself, all of the legs inward against the body). So, at that time, I sit the spider body up on a platform and began to recalibrate the legs so that they would walk instead of belly floppin when I tried to make it walk! So, I click “read” on the “regs table” and all of the servos then read “0 (offset) and 1500 (for the slider part)”! The “write option” isnt clickable at this time, I guess I gotta make a change before I can “write”, makes sense!
So, I calibrate all of the legs so the spider would be “standing” and not “sitting”, all of the servos are recalibrated and all so i hit “write” and the pop up box verifies “write done”! BOOM, Im thinking that “Now, when ever I plug the battery in, I wont get that contorted look anymore, it sould be standing or something!”! I exit the terminal, unplug the the USB cable, attach the botboarduino via TX, RX, and Grd, apply the pos and neg into the proper terminals, switch the USB jumper to EXT, and then there were “LIGHTS”, awesome, good so far!! I grab the remote, hit “Start” after the buzzer sound, Im synced up!! Beautiful!!!
I take the spider, set it on the floor, and she is wobblin like a new born calf…, lol! So, I tried to make her walk, and she flops to the ground! Im puzzled at this point…, I play with a few more buttons, like stretching and retracting its arms while its laying of the floor…, and then I hit a button that made all of the legs pull toward the body back into protective mode (I guess)! and then it turns off, The battery must’ve came loose!
I tightened back up the terminals, and plugged the battery back in…, and the spider went right back into the contorted mode!.. At this time, I was thinking, “Ok, it must be a memory sorta thing to where it would need a power source to retain memory” and then it occurred to me that thats never happened to an of my arduinos, it shouldve burned onto the chip like downloading a code from an arduino!
I then take the botboarduino off correctly and start over with just the SSC32u once again! I place the contorted spider back up on the platform from before, hook up the USB (while powered on), opened up the terminal, verified the baud rate 38400, hit the “All 1500” and all servos centered up! I go back into the “Reg” table, and I hit “read”, it read out exactly what I wrote from before…! So, Im really confused at this point! Wasnt the spider suppose to go into the positive that i wrote it in and not the contorted position?
On the “reg” table, there is a “selection” tab, the number of the servo block, the “offset” block, and the “slider” setting block! So, I click the “servo selection” tab on the far left beside the servo “0” and that servo reacted…, I select the “servo selection 1” and that servo reacted…, I repeated through all of the rest of the servos and they all went back to what I wrote originally…, the spider is now in the standing position!
Ok, so hopefully you see my delima here, why did my spider contort after hooking back up the battery the second time after making it stand up and writing it to the ssc32? Why didnt my spider walk when I operated the remote, it just flopped to the ground?!! Why did I have to reset all of the servos when I hooked back into the Lynxmotion terminal? I have so many questions, lol! I really need to do video on this!!






 )!
)!