I've been lurking on this site reading and looking and finally got enough good info to create my first robot.
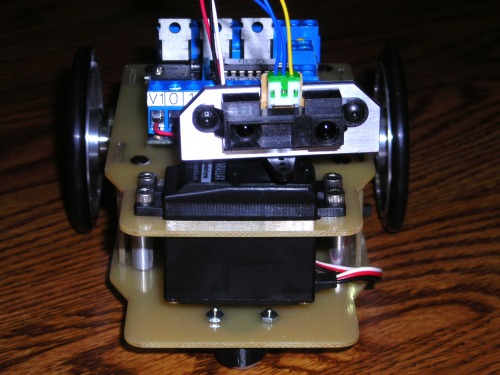
The chassis is made from 1.6mm thick phenolic. Laser cut from a sheet. Alum wheels were from another old project. I narrowed them and fitted an O-ring tire. Entire robot was modeled in SolidWorks 2009.
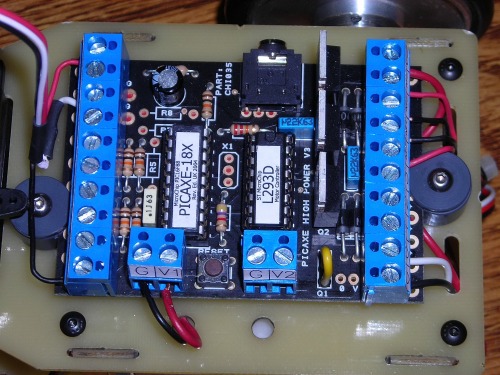
Picaxe 18X High Power board (CHI-035) supplies the brains. I had to remove (1) MOSFET and add a jumper to control my Sharp vision servo. Also added the screw type terminal blocks.
Front "wheel" is a Pololu Roller Ball. Servo is a Parrallax (Futaba #FP-S148)
Many thanks to Fritsl for making available the program which I tweaked a bit to get this guy running! The mechanical and electrical parts I can do fairly well but I have a *LOT* to learn about programming. This will get me a good start while I play with future additions and maybe the design for my next bot.
The wheels started out as a r/c drag car project years ago. They were made on CNC lathe at the machine shop where I work. The r/c club ended before I got the car built. I cut them down for the Bot and used a large rubber O-ring for a tire. They are 2.00" [50mm] in dia., 2.38" [60.3mm] with tire.
I have a CHI035A board, 18M2 and a SN754410 all on order (I like the fairly local “SparkFun”) but I have a question…
Have you tried to control motor speed yet? I can’t see a way of PWMing more than one motor (the B.6 pin on the 18M2 will control one motor, but not both!) I may have to “pull” the h-bridge and put it on a perfboard so I can control the enable pins.
Like I said, I love the bot! Very STRONG, basic look to it that is something mine never look like. I do great with the electronic design, a little less with the programming and I am horrible at the mechanical stuff.
Keep up the great work and let me know if you can control your motor speed, and how???
(BTW, A 18M2 SHOULD drop right in to that board in the future and has a huge amount of new features!)
You are correct, the 18 series chip will not do PWM on (2) pins. The motors went fairly slow so I did not have to mess with the speed. It needed a little speed control since the motors ran in opposite directions and the rear wheels were turning at slightly different rpm, causing it to run on a curve not straight. I do poorly with programming and had some help with the program. You can use a “pause” command to slow the motors down.



 I do great with the electronic design, a little less with the programming and I am horrible at the mechanical stuff.
I do great with the electronic design, a little less with the programming and I am horrible at the mechanical stuff.