



First Robot-Object Avoider
I've been lurking on this site reading and looking and finally got enough good info to create my first robot.

The chassis is made from 1.6mm thick phenolic. Laser cut from a sheet. Alum wheels were from another old project. I narrowed them and fitted an O-ring tire. Entire robot was modeled in SolidWorks 2009.
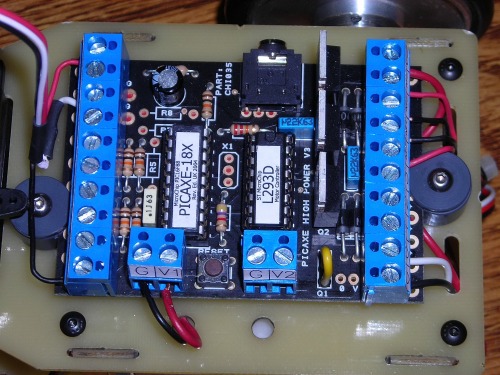
Picaxe 18X High Power board (CHI-035) supplies the brains. I had to remove (1) MOSFET and add a jumper to control my Sharp vision servo. Also added the screw type terminal blocks.
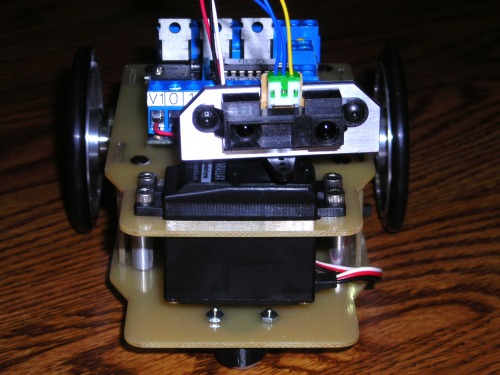
Front "wheel" is a Pololu Roller Ball. Servo is a Parrallax (Futaba #FP-S148)
Many thanks to Fritsl for making available the program which I tweaked a bit to get this guy running! The mechanical and electrical parts I can do fairly well but I have a *LOT* to learn about programming. This will get me a good start while I play with future additions and maybe the design for my next bot.
Wanders about avoiding objects
- Actuators / output devices: Pololu #GM7 Gearbox
- Control method: Autonomous.
- CPU: picaxe 18x
- Operating system: windows XP
- Power source: 3-AA Rechargeable Cells
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoors