Total cost, including the custom-cut chassis, would be about $165 from Pololu.
Update: my robot took first place our little dead-reckoning competition, beating a robot with a theoretically much nicer setup (motors with built-in encoders offering 100s of counts per revolution and narrow wheels). It was able to follow a black line along a complicated, curved path about 8m long, then return to its starting point automatically, missing the point by about 15 cm. You don't need ultra high resolution encoders for basic navigation - just make sure to calibrate them well!
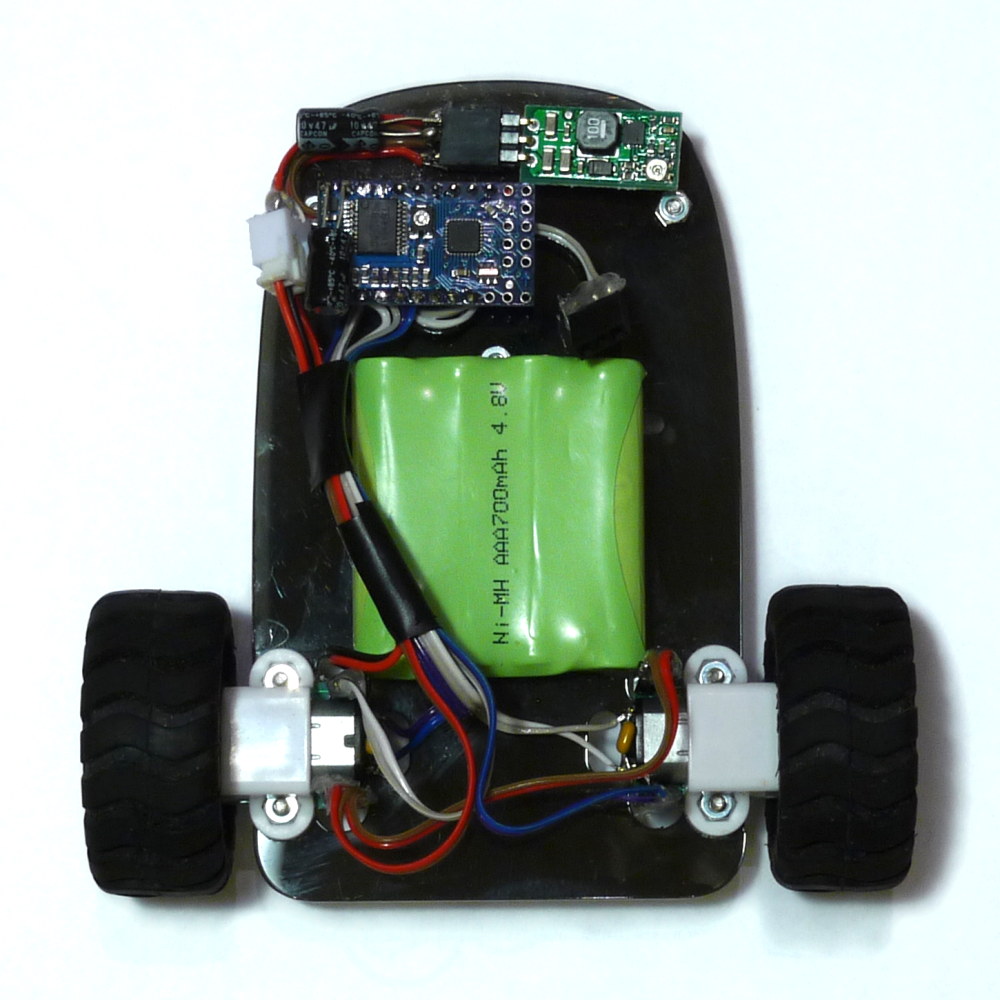
Here are some pictures of the robot. On top, the power regulator plugs in to a header on the front of the robot, and that's how I turn it on - power it up and it starts running! Behind that, the blue board is the baby Orangutan B-328, the brains of the robot. The B-328 plugs in to female header on the QTR sensor board below, and colored ribbon cable is used to connect everything else. There's a 3-pin female port on the right side of the B-328 that I use as a serial interface for checking sensors and motors, since the robot has no display or buttons of its own. The bottom view shows the QTR sensor, ball caster, and the encoders (sandwiched between the motors and the chassis).
this would be a worthy opponent for Pololu’s 3pi. As far as I see all components are Pololu parts except the chassis, is it home made? If possible, you should add links to our components library for the components you are using. I would like to see more.
Okay, I have links to Pololu Okay, I have links to Pololu and to the components library. This is “home made” in the sense that I designed the chassis myself and soldered the pieces together at home last night, but getting this together is made a lot easier by the fact that I do work at Pololu! I’m definitely planning to beat the 3pi on speed here - top speed should be about 2 m/s. Ben has a souped-up 3pi on which he has replaced the motors with 50:1 HP’s (and lowered the boost voltage a bit so it’s not too crazy), so I need to beat that as well.
The tires are made of normal The tires are made of normal rubber, like a car or bike tire, so they have a nice feel but aren’t quite as grippy as silicone. So far I can’t do any good high-speed tests because if I switch directly from a speed of 0 to 100 out of 255, the motors draw enough current to instantly reset the microcontroller. I need to give it some smooth acceleration so that it can get up to speed without ever being completely stalled.
It would drop the voltage to the micro by a diode, but when a heavy draw from the motors occurs (through the boost regulator) the cap should be able to supply the micro briefly until the voltage gets back up. You'd have to size the diode to supply enough current for the micro and any sensors, maybe 200 mA. A 1N5817 might work. Then get a hefty electrolytic, say 470 uF up, to act as a temporary supply for the micro.
Okay, a 47uF capacitor Okay, a 47uF capacitor across the power input on the Baby Orangutan did the trick, and this robot can now drive around pretty quickly without shutting down.
It turned out that I also It turned out that I also needed 47uF on the battery power line as well; otherwise the regulated voltage output is not stable with varying motor loads. Dead reckoning with encoders is working well, and I’m moving on to setting up the line sensors! I’ll post a better picture and maybe a movie soon!