



Fast robot with encoders
I'm building this fast robot for the upcomping LVbots mini-competition, which will include dead-reckoning and looped maze-solving contests. I'm using:
- Baby Orangutan B-32 (LMR)
- 42mm tires with wheel encoders (LMR)
- 30:1 HP micro metal gearmotors (LMR)
- 6 sensors broken off of a QTR-8RC (LMR)
- 4xAAA battery pack (LMR)
- adjustable boost voltage regulator set to 6 or 7 V (LMR)
- custom laser-cut chassis (LMR)
Update: my robot took first place our little dead-reckoning competition, beating a robot with a theoretically much nicer setup (motors with built-in encoders offering 100s of counts per revolution and narrow wheels). It was able to follow a black line along a complicated, curved path about 8m long, then return to its starting point automatically, missing the point by about 15 cm. You don't need ultra high resolution encoders for basic navigation - just make sure to calibrate them well!
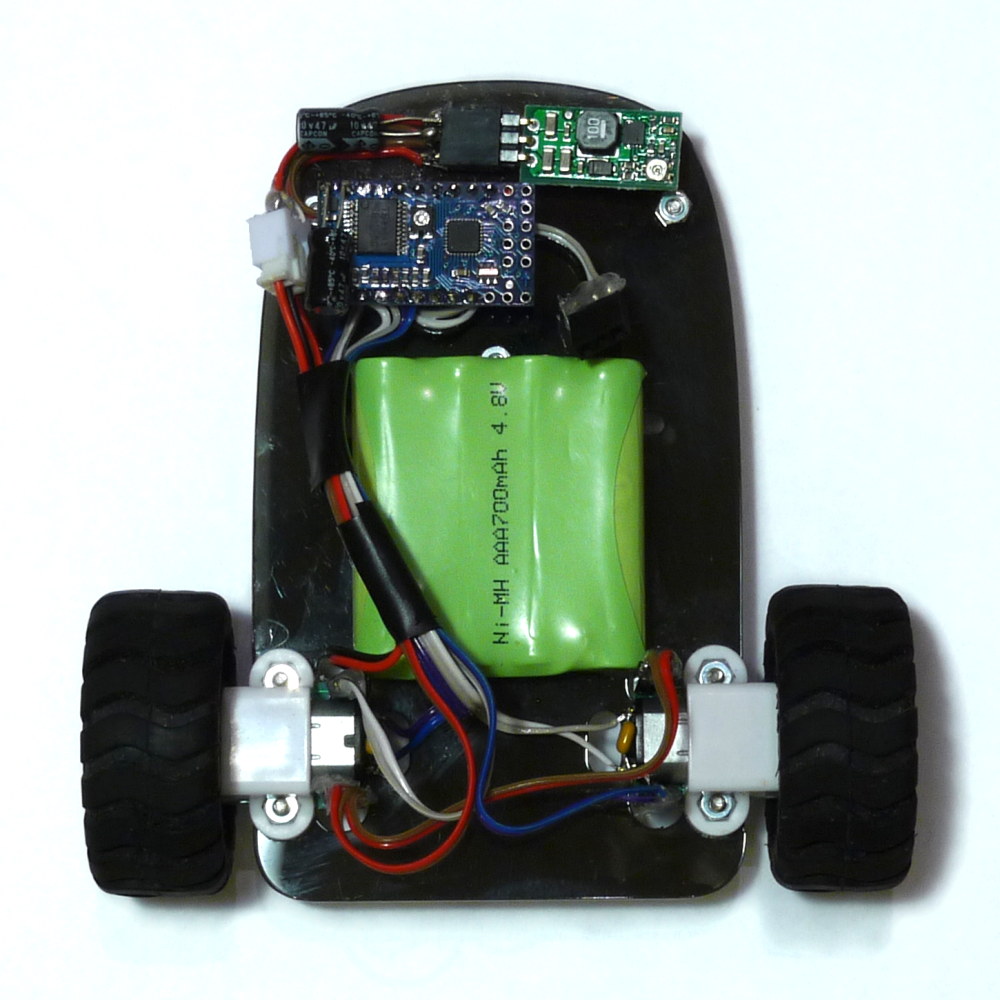
Here are some pictures of the robot. On top, the power regulator plugs in to a header on the front of the robot, and that's how I turn it on - power it up and it starts running! Behind that, the blue board is the baby Orangutan B-328, the brains of the robot. The B-328 plugs in to female header on the QTR sensor board below, and colored ribbon cable is used to connect everything else. There's a 3-pin female port on the right side of the B-328 that I use as a serial interface for checking sensors and motors, since the robot has no display or buttons of its own. The bottom view shows the QTR sensor, ball caster, and the encoders (sandwiched between the motors and the chassis).

Dead reckoning, line following, maze solving
- Actuators / output devices: 30:1 HP micro metal gearmotors
- Control method: autonomous
- CPU: Baby Orangutan B-328
- Power source: 4.8V 700Mah NiMH
- Programming language: C (AVR GCC)
- Sensors / input devices: QTR-8RC, Pololu encoders
- Target environment: indoor flat surfaces