This is my second robot! With a better understanding of robot building and navigaton programming i´ve came up with this robot!
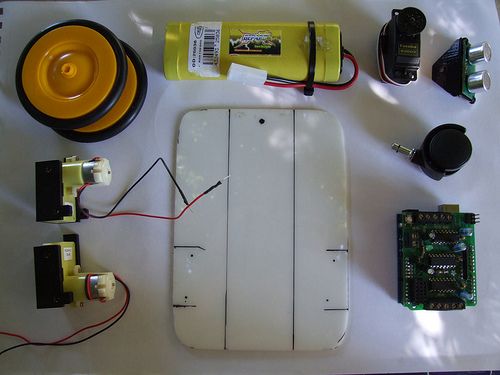
I think that the great improvement here was to make a plan of what i want to build, and started to find solutions before the assemble proccess. So this came out a more successfull robot!!
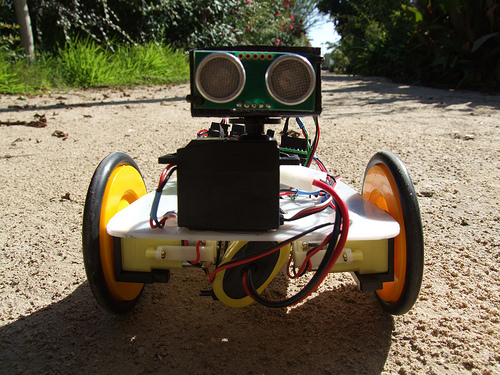
It´s my first real approach of avoiding obstacles and navigation programming and i´ve had a lot fun! Yet, the values that returns from the sensor fluctuate a little and i must work on it!
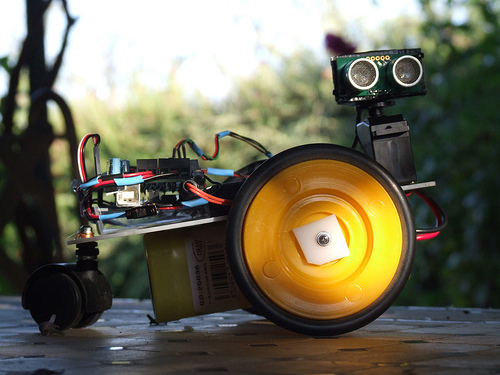
-But it looks like you need to apply some grease to the rotating axle of your back wheel, as it isn’t spinning around when your robot turns. Other than that: Sweet!
hello friend! Unfortunately this robot is not fully documented, but I’m sure if you search on this website you will find everything you need! check the tips/walkthrough section.
Do you have experience with microcontrollers, programming, basic electronics?


 Really nice, it has got a lot of personality, smooth move etc, cool!
Really nice, it has got a lot of personality, smooth move etc, cool!